 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCode World Models for General Game Playing
Oct 06, 2025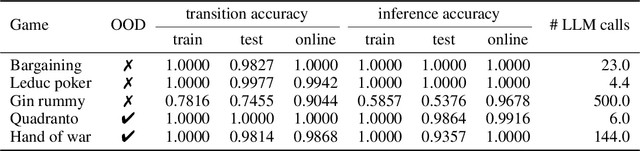

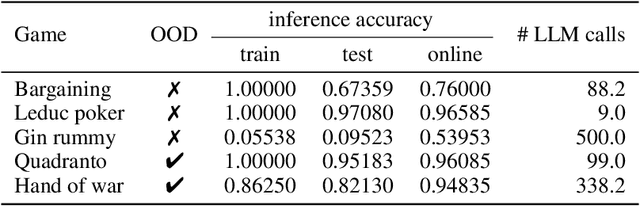
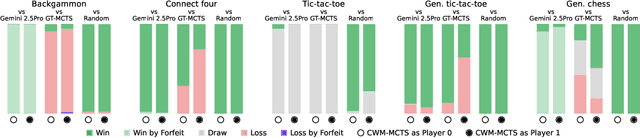
Large Language Models (LLMs) reasoning abilities are increasingly being applied to classical board and card games, but the dominant approach -- involving prompting for direct move generation -- has significant drawbacks. It relies on the model's implicit fragile pattern-matching capabilities, leading to frequent illegal moves and strategically shallow play. Here we introduce an alternative approach: We use the LLM to translate natural language rules and game trajectories into a formal, executable world model represented as Python code. This generated model -- comprising functions for state transition, legal move enumeration, and termination checks -- serves as a verifiable simulation engine for high-performance planning algorithms like Monte Carlo tree search (MCTS). In addition, we prompt the LLM to generate heuristic value functions (to make MCTS more efficient), and inference functions (to estimate hidden states in imperfect information games). Our method offers three distinct advantages compared to directly using the LLM as a policy: (1) Verifiability: The generated CWM serves as a formal specification of the game's rules, allowing planners to algorithmically enumerate valid actions and avoid illegal moves, contingent on the correctness of the synthesized model; (2) Strategic Depth: We combine LLM semantic understanding with the deep search power of classical planners; and (3) Generalization: We direct the LLM to focus on the meta-task of data-to-code translation, enabling it to adapt to new games more easily. We evaluate our agent on 10 different games, of which 4 are novel and created for this paper. 5 of the games are fully observed (perfect information), and 5 are partially observed (imperfect information). We find that our method outperforms or matches Gemini 2.5 Pro in 9 out of the 10 considered games.
Improving Transformer World Models for Data-Efficient RL
Feb 03, 2025



We present an approach to model-based RL that achieves a new state of the art performance on the challenging Craftax-classic benchmark, an open-world 2D survival game that requires agents to exhibit a wide range of general abilities -- such as strong generalization, deep exploration, and long-term reasoning. With a series of careful design choices aimed at improving sample efficiency, our MBRL algorithm achieves a reward of 67.4% after only 1M environment steps, significantly outperforming DreamerV3, which achieves 53.2%, and, for the first time, exceeds human performance of 65.0%. Our method starts by constructing a SOTA model-free baseline, using a novel policy architecture that combines CNNs and RNNs. We then add three improvements to the standard MBRL setup: (a) "Dyna with warmup", which trains the policy on real and imaginary data, (b) "nearest neighbor tokenizer" on image patches, which improves the scheme to create the transformer world model (TWM) inputs, and (c) "block teacher forcing", which allows the TWM to reason jointly about the future tokens of the next timestep.
Model Predictive Simulation Using Structured Graphical Models and Transformers
Jun 28, 2024We propose an approach to simulating trajectories of multiple interacting agents (road users) based on transformers and probabilistic graphical models (PGMs), and apply it to the Waymo SimAgents challenge. The transformer baseline is based on the MTR model, which predicts multiple future trajectories conditioned on the past trajectories and static road layout features. We then improve upon these generated trajectories using a PGM, which contains factors which encode prior knowledge, such as a preference for smooth trajectories, and avoidance of collisions with static obstacles and other moving agents. We perform (approximate) MAP inference in this PGM using the Gauss-Newton method. Finally we sample $K=32$ trajectories for each of the $N \sim 100$ agents for the next $T=8 \Delta$ time steps, where $\Delta=10$ is the sampling rate per second. Following the Model Predictive Control (MPC) paradigm, we only return the first element of our forecasted trajectories at each step, and then we replan, so that the simulation can constantly adapt to its changing environment. We therefore call our approach "Model Predictive Simulation" or MPS. We show that MPS improves upon the MTR baseline, especially in safety critical metrics such as collision rate. Furthermore, our approach is compatible with any underlying forecasting model, and does not require extra training, so we believe it is a valuable contribution to the community.
Schema-learning and rebinding as mechanisms of in-context learning and emergence
Jun 16, 2023
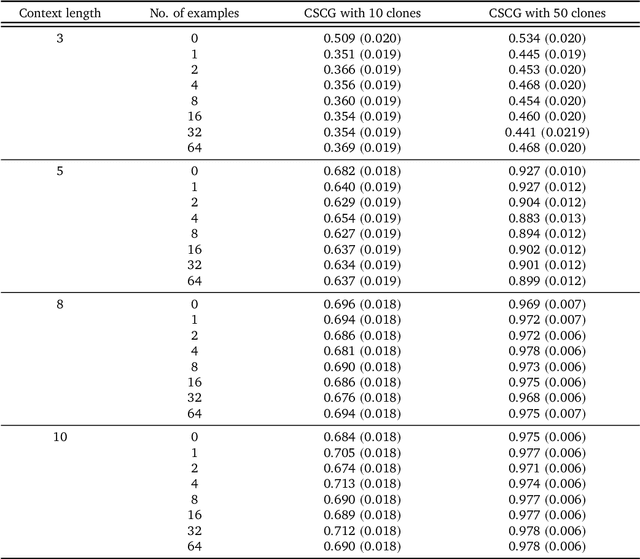
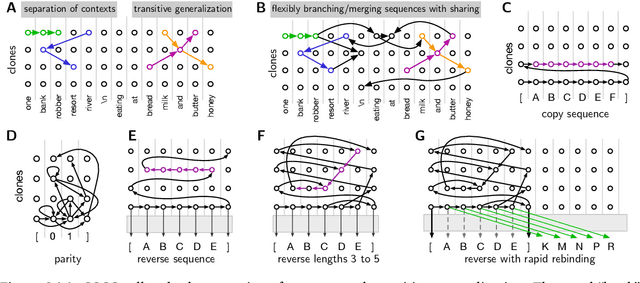
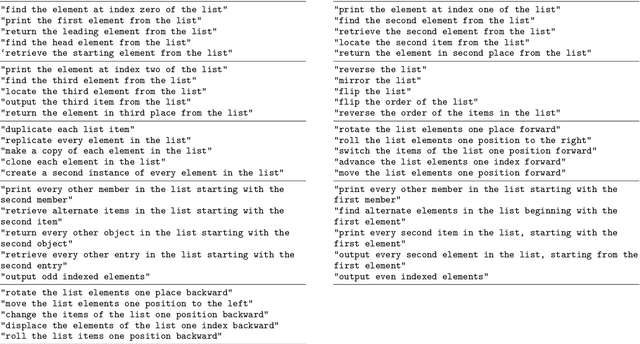
In-context learning (ICL) is one of the most powerful and most unexpected capabilities to emerge in recent transformer-based large language models (LLMs). Yet the mechanisms that underlie it are poorly understood. In this paper, we demonstrate that comparable ICL capabilities can be acquired by an alternative sequence prediction learning method using clone-structured causal graphs (CSCGs). Moreover, a key property of CSCGs is that, unlike transformer-based LLMs, they are {\em interpretable}, which considerably simplifies the task of explaining how ICL works. Specifically, we show that it uses a combination of (a) learning template (schema) circuits for pattern completion, (b) retrieving relevant templates in a context-sensitive manner, and (c) rebinding of novel tokens to appropriate slots in the templates. We go on to marshall evidence for the hypothesis that similar mechanisms underlie ICL in LLMs. For example, we find that, with CSCGs as with LLMs, different capabilities emerge at different levels of overparameterization, suggesting that overparameterization helps in learning more complex template (schema) circuits. By showing how ICL can be achieved with small models and datasets, we open up a path to novel architectures, and take a vital step towards a more general understanding of the mechanics behind this important capability.
Fast exploration and learning of latent graphs with aliased observations
Mar 21, 2023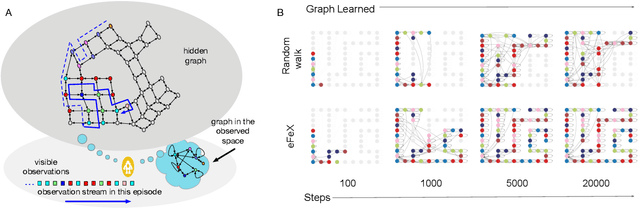
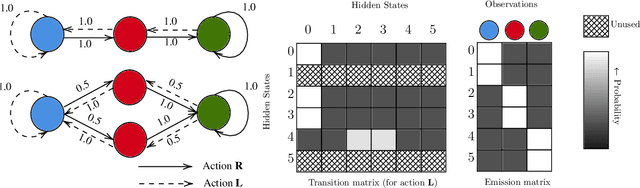
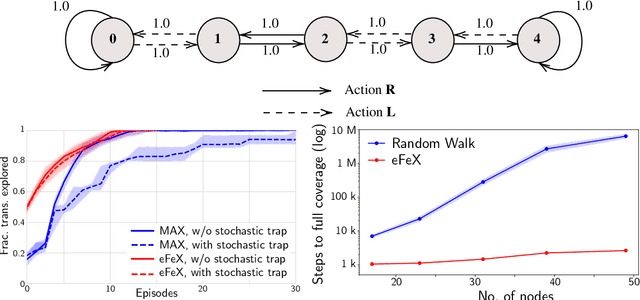
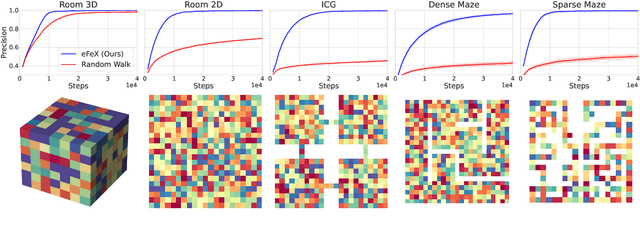
Consider this scenario: an agent navigates a latent graph by performing actions that take it from one node to another. The chosen action determines the probability distribution over the next visited node. At each node, the agent receives an observation, but this observation is not unique, so it does not identify the node, making the problem aliased. The purpose of this work is to provide a policy that approximately maximizes exploration efficiency (i.e., how well the graph is recovered for a given exploration budget). In the unaliased case, we show improved performance w.r.t. state-of-the-art reinforcement learning baselines. For the aliased case we are not aware of suitable baselines and instead show faster recovery w.r.t. a random policy for a wide variety of topologies, and exponentially faster recovery than a random policy for challenging topologies. We dub the algorithm eFeX (from eFficient eXploration).
PushWorld: A benchmark for manipulation planning with tools and movable obstacles
Feb 01, 2023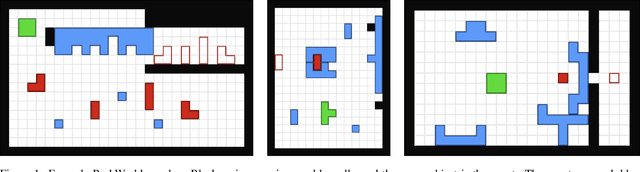

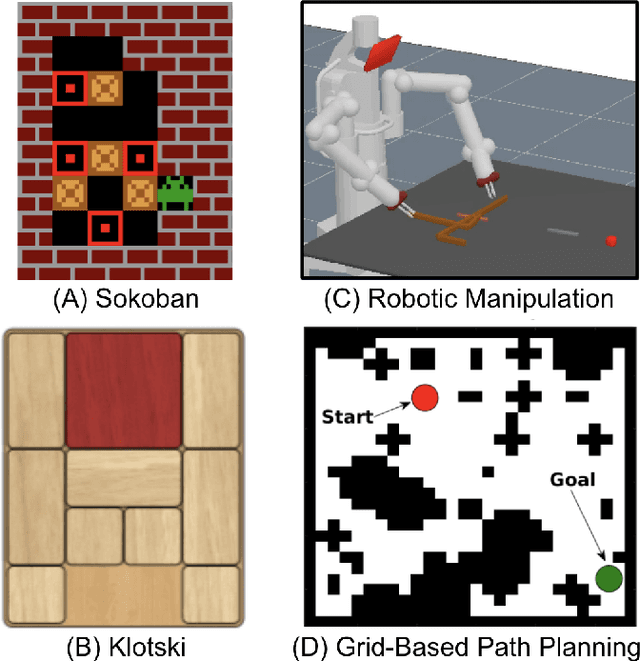
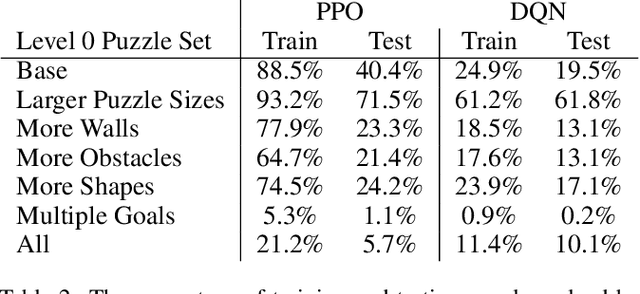
While recent advances in artificial intelligence have achieved human-level performance in environments like Starcraft and Go, many physical reasoning tasks remain challenging for modern algorithms. To date, few algorithms have been evaluated on physical tasks that involve manipulating objects when movable obstacles are present and when tools must be used to perform the manipulation. To promote research on such tasks, we introduce PushWorld, an environment with simplistic physics that requires manipulation planning with both movable obstacles and tools. We provide a benchmark of more than 200 PushWorld puzzles in PDDL and in an OpenAI Gym environment. We evaluate state-of-the-art classical planning and reinforcement learning algorithms on this benchmark, and we find that these baseline results are below human-level performance. We then provide a new classical planning heuristic that solves the most puzzles among the baselines, and although it is 40 times faster than the best baseline planner, it remains below human-level performance.
Learning noisy-OR Bayesian Networks with Max-Product Belief Propagation
Jan 31, 2023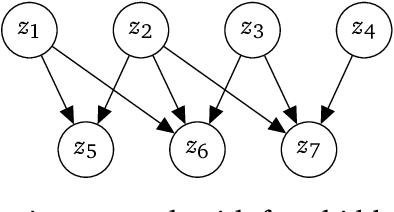
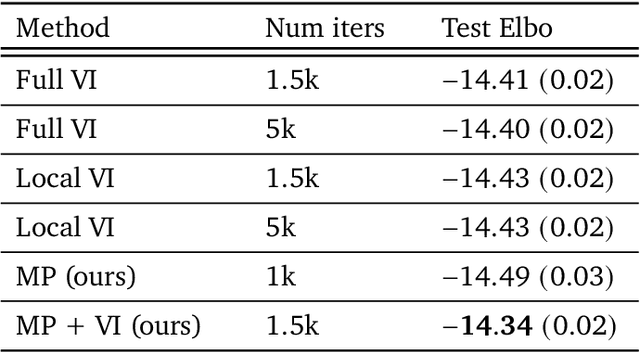
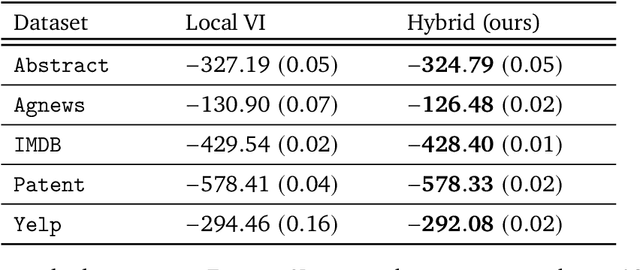

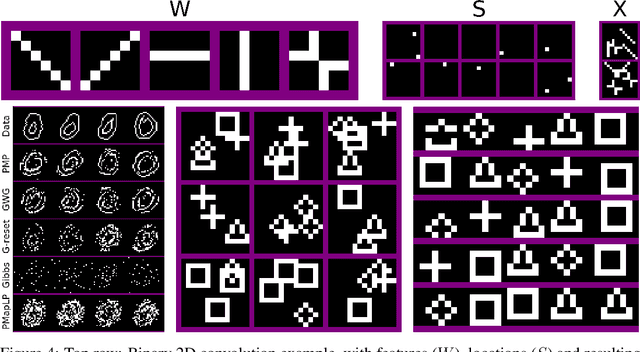
Noisy-OR Bayesian Networks (BNs) are a family of probabilistic graphical models which express rich statistical dependencies in binary data. Variational inference (VI) has been the main method proposed to learn noisy-OR BNs with complex latent structures (Jaakkola & Jordan, 1999; Ji et al., 2020; Buhai et al., 2020). However, the proposed VI approaches either (a) use a recognition network with standard amortized inference that cannot induce ``explaining-away''; or (b) assume a simple mean-field (MF) posterior which is vulnerable to bad local optima. Existing MF VI methods also update the MF parameters sequentially which makes them inherently slow. In this paper, we propose parallel max-product as an alternative algorithm for learning noisy-OR BNs with complex latent structures and we derive a fast stochastic training scheme that scales to large datasets. We evaluate both approaches on several benchmarks where VI is the state-of-the-art and show that our method (a) achieves better test performance than Ji et al. (2020) for learning noisy-OR BNs with hierarchical latent structures on large sparse real datasets; (b) recovers a higher number of ground truth parameters than Buhai et al. (2020) from cluttered synthetic scenes; and (c) solves the 2D blind deconvolution problem from Lazaro-Gredilla et al. (2021) and variant - including binary matrix factorization - while VI catastrophically fails and is up to two orders of magnitude slower.
Perturb-and-max-product: Sampling and learning in discrete energy-based models
Nov 05, 2021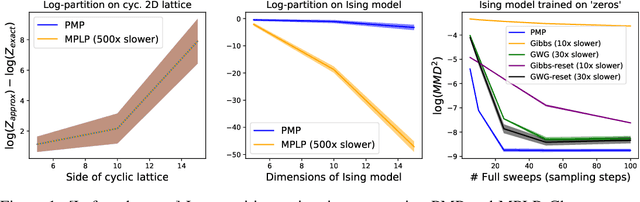
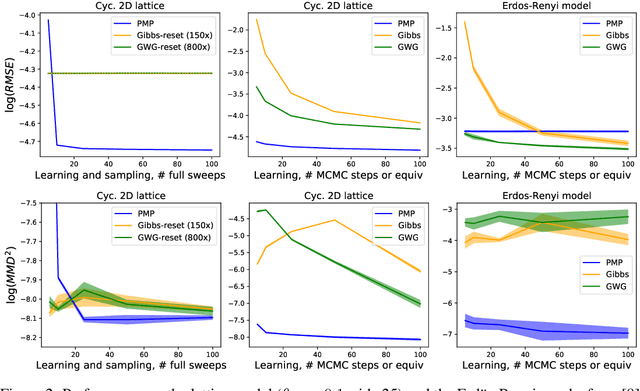
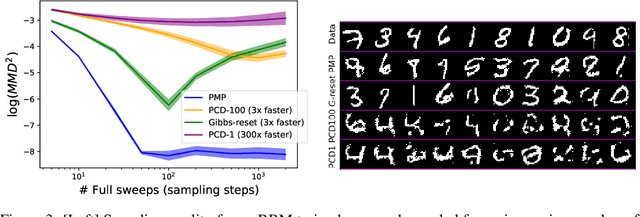
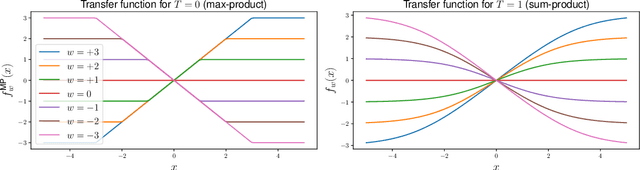
Perturb-and-MAP offers an elegant approach to approximately sample from a energy-based model (EBM) by computing the maximum-a-posteriori (MAP) configuration of a perturbed version of the model. Sampling in turn enables learning. However, this line of research has been hindered by the general intractability of the MAP computation. Very few works venture outside tractable models, and when they do, they use linear programming approaches, which as we will show, have several limitations. In this work we present perturb-and-max-product (PMP), a parallel and scalable mechanism for sampling and learning in discrete EBMs. Models can be arbitrary as long as they are built using tractable factors. We show that (a) for Ising models, PMP is orders of magnitude faster than Gibbs and Gibbs-with-Gradients (GWG) at learning and generating samples of similar or better quality; (b) PMP is able to learn and sample from RBMs; (c) in a large, entangled graphical model in which Gibbs and GWG fail to mix, PMP succeeds.
Learning undirected models via query training
Dec 05, 2019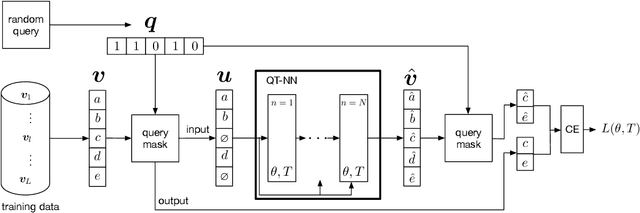

Typical amortized inference in variational autoencoders is specialized for a single probabilistic query. Here we propose an inference network architecture that generalizes to unseen probabilistic queries. Instead of an encoder-decoder pair, we can train a single inference network directly from data, using a cost function that is stochastic not only over samples, but also over queries. We can use this network to perform the same inference tasks as we would in an undirected graphical model with hidden variables, without having to deal with the intractable partition function. The results can be mapped to the learning of an actual undirected model, which is a notoriously hard problem. Our network also marginalizes nuisance variables as required. We show that our approach generalizes to unseen probabilistic queries on also unseen test data, providing fast and flexible inference. Experiments show that this approach outperforms or matches PCD and AdVIL on 9 benchmark datasets.
Cortical Microcircuits from a Generative Vision Model
Aug 03, 2018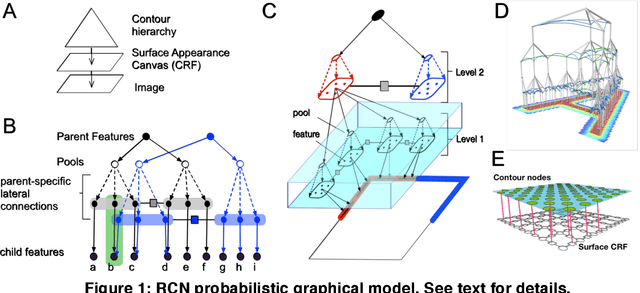
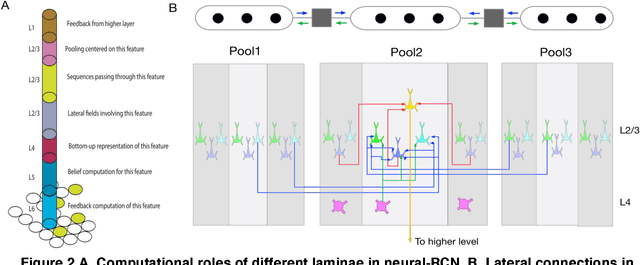
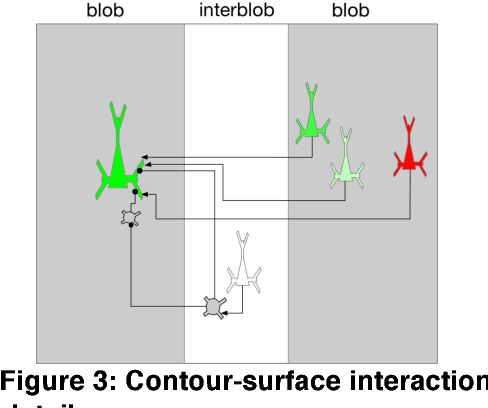
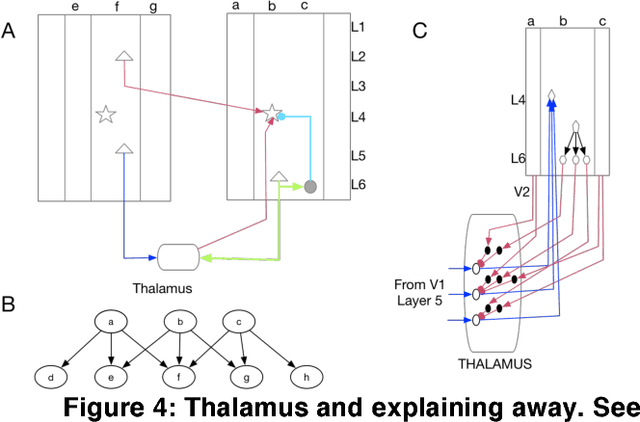
Understanding the information processing roles of cortical circuits is an outstanding problem in neuroscience and artificial intelligence. The theoretical setting of Bayesian inference has been suggested as a framework for understanding cortical computation. Based on a recently published generative model for visual inference (George et al., 2017), we derive a family of anatomically instantiated and functional cortical circuit models. In contrast to simplistic models of Bayesian inference, the underlying generative model's representational choices are validated with real-world tasks that required efficient inference and strong generalization. The cortical circuit model is derived by systematically comparing the computational requirements of this model with known anatomical constraints. The derived model suggests precise functional roles for the feedforward, feedback and lateral connections observed in different laminae and columns, and assigns a computational role for the path through the thalamus.