 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCode World Models for General Game Playing
Oct 06, 2025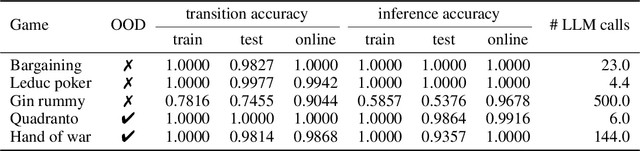

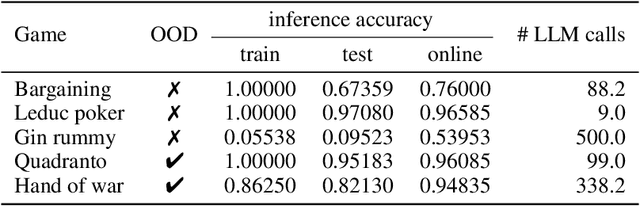
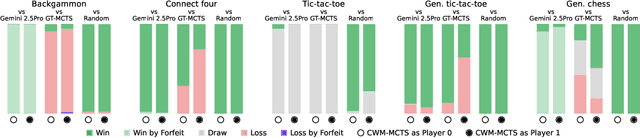
Large Language Models (LLMs) reasoning abilities are increasingly being applied to classical board and card games, but the dominant approach -- involving prompting for direct move generation -- has significant drawbacks. It relies on the model's implicit fragile pattern-matching capabilities, leading to frequent illegal moves and strategically shallow play. Here we introduce an alternative approach: We use the LLM to translate natural language rules and game trajectories into a formal, executable world model represented as Python code. This generated model -- comprising functions for state transition, legal move enumeration, and termination checks -- serves as a verifiable simulation engine for high-performance planning algorithms like Monte Carlo tree search (MCTS). In addition, we prompt the LLM to generate heuristic value functions (to make MCTS more efficient), and inference functions (to estimate hidden states in imperfect information games). Our method offers three distinct advantages compared to directly using the LLM as a policy: (1) Verifiability: The generated CWM serves as a formal specification of the game's rules, allowing planners to algorithmically enumerate valid actions and avoid illegal moves, contingent on the correctness of the synthesized model; (2) Strategic Depth: We combine LLM semantic understanding with the deep search power of classical planners; and (3) Generalization: We direct the LLM to focus on the meta-task of data-to-code translation, enabling it to adapt to new games more easily. We evaluate our agent on 10 different games, of which 4 are novel and created for this paper. 5 of the games are fully observed (perfect information), and 5 are partially observed (imperfect information). We find that our method outperforms or matches Gemini 2.5 Pro in 9 out of the 10 considered games.
Improving Transformer World Models for Data-Efficient RL
Feb 03, 2025



We present an approach to model-based RL that achieves a new state of the art performance on the challenging Craftax-classic benchmark, an open-world 2D survival game that requires agents to exhibit a wide range of general abilities -- such as strong generalization, deep exploration, and long-term reasoning. With a series of careful design choices aimed at improving sample efficiency, our MBRL algorithm achieves a reward of 67.4% after only 1M environment steps, significantly outperforming DreamerV3, which achieves 53.2%, and, for the first time, exceeds human performance of 65.0%. Our method starts by constructing a SOTA model-free baseline, using a novel policy architecture that combines CNNs and RNNs. We then add three improvements to the standard MBRL setup: (a) "Dyna with warmup", which trains the policy on real and imaginary data, (b) "nearest neighbor tokenizer" on image patches, which improves the scheme to create the transformer world model (TWM) inputs, and (c) "block teacher forcing", which allows the TWM to reason jointly about the future tokens of the next timestep.
DMC-VB: A Benchmark for Representation Learning for Control with Visual Distractors
Sep 26, 2024



Learning from previously collected data via behavioral cloning or offline reinforcement learning (RL) is a powerful recipe for scaling generalist agents by avoiding the need for expensive online learning. Despite strong generalization in some respects, agents are often remarkably brittle to minor visual variations in control-irrelevant factors such as the background or camera viewpoint. In this paper, we present theDeepMind Control Visual Benchmark (DMC-VB), a dataset collected in the DeepMind Control Suite to evaluate the robustness of offline RL agents for solving continuous control tasks from visual input in the presence of visual distractors. In contrast to prior works, our dataset (a) combines locomotion and navigation tasks of varying difficulties, (b) includes static and dynamic visual variations, (c) considers data generated by policies with different skill levels, (d) systematically returns pairs of state and pixel observation, (e) is an order of magnitude larger, and (f) includes tasks with hidden goals. Accompanying our dataset, we propose three benchmarks to evaluate representation learning methods for pretraining, and carry out experiments on several recently proposed methods. First, we find that pretrained representations do not help policy learning on DMC-VB, and we highlight a large representation gap between policies learned on pixel observations and on states. Second, we demonstrate when expert data is limited, policy learning can benefit from representations pretrained on (a) suboptimal data, and (b) tasks with stochastic hidden goals. Our dataset and benchmark code to train and evaluate agents are available at: https://github.com/google-deepmind/dmc_vision_benchmark.
Graph schemas as abstractions for transfer learning, inference, and planning
Feb 14, 2023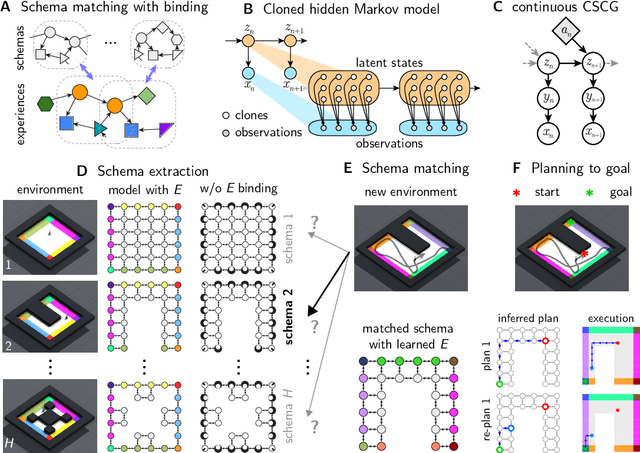



We propose schemas as a model for abstractions that can be used for rapid transfer learning, inference, and planning. Common structured representations of concepts and behaviors -- schemas -- have been proposed as a powerful way to encode abstractions. Latent graph learning is emerging as a new computational model of the hippocampus to explain map learning and transitive inference. We build on this work to show that learned latent graphs in these models have a slot structure -- schemas -- that allow for quick knowledge transfer across environments. In a new environment, an agent can rapidly learn new bindings between the sensory stream to multiple latent schemas and select the best fitting one to guide behavior. To evaluate these graph schemas, we use two previously published challenging tasks: the memory & planning game and one-shot StreetLearn, that are designed to test rapid task solving in novel environments. Graph schemas can be learned in far fewer episodes than previous baselines, and can model and plan in a few steps in novel variations of these tasks. We further demonstrate learning, matching, and reusing graph schemas in navigation tasks in more challenging environments with aliased observations and size variations, and show how different schemas can be composed to model larger 2D and 3D environments.