 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBelief Attribution as Mental Explanation: The Role of Accuracy, Informativity, and Causality
May 26, 2025A key feature of human theory-of-mind is the ability to attribute beliefs to other agents as mentalistic explanations for their behavior. But given the wide variety of beliefs that agents may hold about the world and the rich language we can use to express them, which specific beliefs are people inclined to attribute to others? In this paper, we investigate the hypothesis that people prefer to attribute beliefs that are good explanations for the behavior they observe. We develop a computational model that quantifies the explanatory strength of a (natural language) statement about an agent's beliefs via three factors: accuracy, informativity, and causal relevance to actions, each of which can be computed from a probabilistic generative model of belief-driven behavior. Using this model, we study the role of each factor in how people selectively attribute beliefs to other agents. We investigate this via an experiment where participants watch an agent collect keys hidden in boxes in order to reach a goal, then rank a set of statements describing the agent's beliefs about the boxes' contents. We find that accuracy and informativity perform reasonably well at predicting these rankings when combined, but that causal relevance is the single factor that best explains participants' responses.
Self-Steering Language Models
Apr 09, 2025While test-time reasoning enables language models to tackle complex tasks, searching or planning in natural language can be slow, costly, and error-prone. But even when LMs struggle to emulate the precise reasoning steps needed to solve a problem, they often excel at describing its abstract structure--both how to verify solutions and how to search for them. This paper introduces DisCIPL, a method for "self-steering" LMs where a Planner model generates a task-specific inference program that is executed by a population of Follower models. Our approach equips LMs with the ability to write recursive search procedures that guide LM inference, enabling new forms of verifiable and efficient reasoning. When instantiated with a small Follower (e.g., Llama-3.2-1B), DisCIPL matches (and sometimes outperforms) much larger models, including GPT-4o and o1, on challenging constrained generation tasks. In decoupling planning from execution, our work opens up a design space of highly-parallelized Monte Carlo inference strategies that outperform standard best-of-N sampling, require no finetuning, and can be implemented automatically by existing LMs.
Probabilistic Programming with Programmable Variational Inference
Jun 22, 2024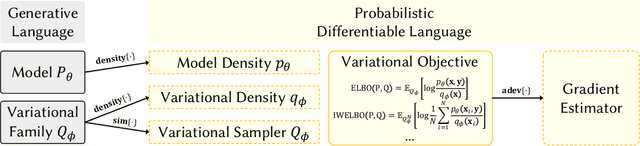
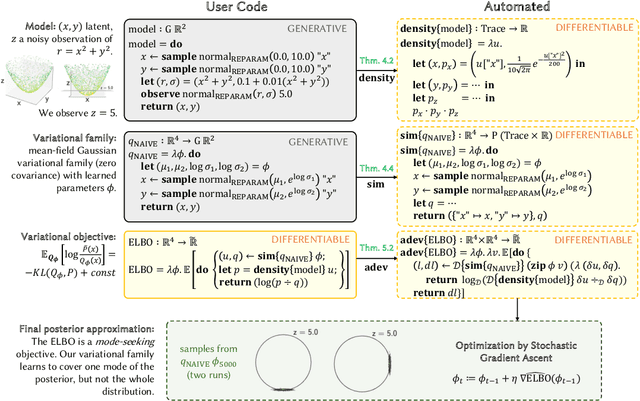

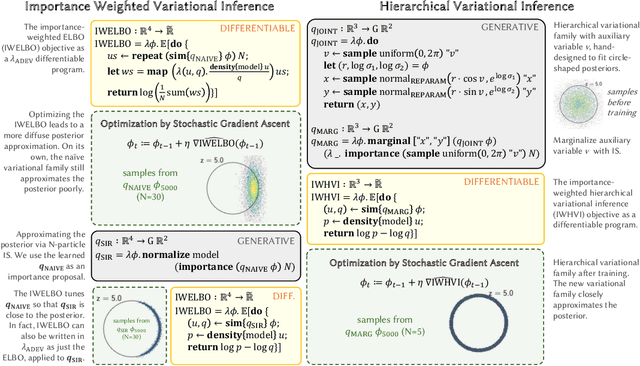
Compared to the wide array of advanced Monte Carlo methods supported by modern probabilistic programming languages (PPLs), PPL support for variational inference (VI) is less developed: users are typically limited to a predefined selection of variational objectives and gradient estimators, which are implemented monolithically (and without formal correctness arguments) in PPL backends. In this paper, we propose a more modular approach to supporting variational inference in PPLs, based on compositional program transformation. In our approach, variational objectives are expressed as programs, that may employ first-class constructs for computing densities of and expected values under user-defined models and variational families. We then transform these programs systematically into unbiased gradient estimators for optimizing the objectives they define. Our design enables modular reasoning about many interacting concerns, including automatic differentiation, density accumulation, tracing, and the application of unbiased gradient estimation strategies. Additionally, relative to existing support for VI in PPLs, our design increases expressiveness along three axes: (1) it supports an open-ended set of user-defined variational objectives, rather than a fixed menu of options; (2) it supports a combinatorial space of gradient estimation strategies, many not automated by today's PPLs; and (3) it supports a broader class of models and variational families, because it supports constructs for approximate marginalization and normalization (previously introduced only for Monte Carlo inference). We implement our approach in an extension to the Gen probabilistic programming system (genjax.vi, implemented in JAX), and evaluate on several deep generative modeling tasks, showing minimal performance overhead vs. hand-coded implementations and performance competitive with well-established open-source PPLs.
Bayes3D: fast learning and inference in structured generative models of 3D objects and scenes
Dec 14, 2023



Robots cannot yet match humans' ability to rapidly learn the shapes of novel 3D objects and recognize them robustly despite clutter and occlusion. We present Bayes3D, an uncertainty-aware perception system for structured 3D scenes, that reports accurate posterior uncertainty over 3D object shape, pose, and scene composition in the presence of clutter and occlusion. Bayes3D delivers these capabilities via a novel hierarchical Bayesian model for 3D scenes and a GPU-accelerated coarse-to-fine sequential Monte Carlo algorithm. Quantitative experiments show that Bayes3D can learn 3D models of novel objects from just a handful of views, recognizing them more robustly and with orders of magnitude less training data than neural baselines, and tracking 3D objects faster than real time on a single GPU. We also demonstrate that Bayes3D learns complex 3D object models and accurately infers 3D scene composition when used on a Panda robot in a tabletop scenario.
Sequential Monte Carlo Learning for Time Series Structure Discovery
Jul 13, 2023This paper presents a new approach to automatically discovering accurate models of complex time series data. Working within a Bayesian nonparametric prior over a symbolic space of Gaussian process time series models, we present a novel structure learning algorithm that integrates sequential Monte Carlo (SMC) and involutive MCMC for highly effective posterior inference. Our method can be used both in "online" settings, where new data is incorporated sequentially in time, and in "offline" settings, by using nested subsets of historical data to anneal the posterior. Empirical measurements on real-world time series show that our method can deliver 10x--100x runtime speedups over previous MCMC and greedy-search structure learning algorithms targeting the same model family. We use our method to perform the first large-scale evaluation of Gaussian process time series structure learning on a prominent benchmark of 1,428 econometric datasets. The results show that our method discovers sensible models that deliver more accurate point forecasts and interval forecasts over multiple horizons as compared to widely used statistical and neural baselines that struggle on this challenging data.
* 17 pages, 8 figures, 2 tables. Appearing in ICML 2023
Differentiating Metropolis-Hastings to Optimize Intractable Densities
Jun 30, 2023We develop an algorithm for automatic differentiation of Metropolis-Hastings samplers, allowing us to differentiate through probabilistic inference, even if the model has discrete components within it. Our approach fuses recent advances in stochastic automatic differentiation with traditional Markov chain coupling schemes, providing an unbiased and low-variance gradient estimator. This allows us to apply gradient-based optimization to objectives expressed as expectations over intractable target densities. We demonstrate our approach by finding an ambiguous observation in a Gaussian mixture model and by maximizing the specific heat in an Ising model.
From Word Models to World Models: Translating from Natural Language to the Probabilistic Language of Thought
Jun 23, 2023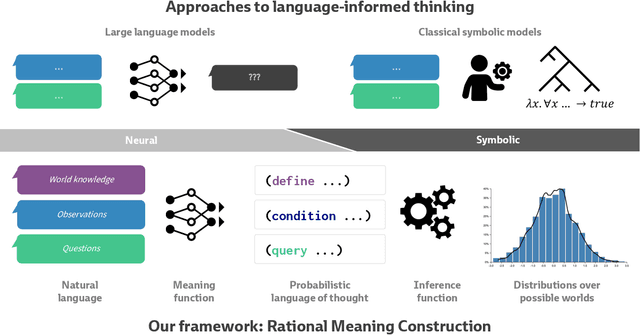
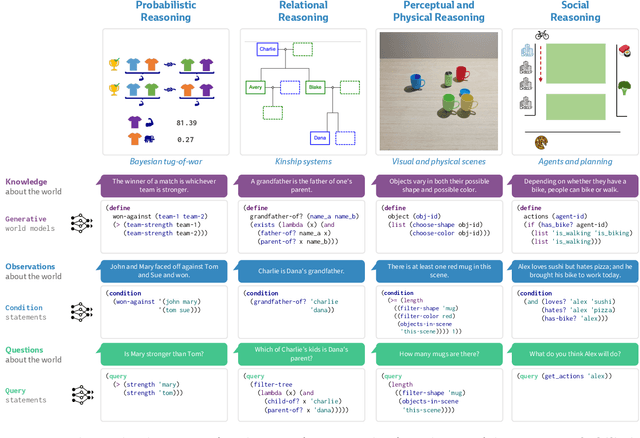


How does language inform our downstream thinking? In particular, how do humans make meaning from language--and how can we leverage a theory of linguistic meaning to build machines that think in more human-like ways? In this paper, we propose rational meaning construction, a computational framework for language-informed thinking that combines neural language models with probabilistic models for rational inference. We frame linguistic meaning as a context-sensitive mapping from natural language into a probabilistic language of thought (PLoT)--a general-purpose symbolic substrate for generative world modeling. Our architecture integrates two computational tools that have not previously come together: we model thinking with probabilistic programs, an expressive representation for commonsense reasoning; and we model meaning construction with large language models (LLMs), which support broad-coverage translation from natural language utterances to code expressions in a probabilistic programming language. We illustrate our framework through examples covering four core domains from cognitive science: probabilistic reasoning, logical and relational reasoning, visual and physical reasoning, and social reasoning. In each, we show that LLMs can generate context-sensitive translations that capture pragmatically-appropriate linguistic meanings, while Bayesian inference with the generated programs supports coherent and robust commonsense reasoning. We extend our framework to integrate cognitively-motivated symbolic modules (physics simulators, graphics engines, and planning algorithms) to provide a unified commonsense thinking interface from language. Finally, we explore how language can drive the construction of world models themselves. We hope this work will provide a roadmap towards cognitive models and AI systems that synthesize the insights of both modern and classical computational perspectives.
Sequential Monte Carlo Steering of Large Language Models using Probabilistic Programs
Jun 05, 2023Even after fine-tuning and reinforcement learning, large language models (LLMs) can be difficult, if not impossible, to control reliably with prompts alone. We propose a new inference-time approach to enforcing syntactic and semantic constraints on the outputs of LLMs, called sequential Monte Carlo (SMC) steering. The key idea is to specify language generation tasks as posterior inference problems in a class of discrete probabilistic sequence models, and replace standard decoding with sequential Monte Carlo inference. For a computational cost similar to that of beam search, SMC can steer LLMs to solve diverse tasks, including infilling, generation under syntactic constraints, and prompt intersection. To facilitate experimentation with SMC steering, we present a probabilistic programming library, LLaMPPL (https://github.com/probcomp/LLaMPPL), for concisely specifying new generation tasks as language model probabilistic programs, and automating steering of LLaMA-family Transformers.
$ω$PAP Spaces: Reasoning Denotationally About Higher-Order, Recursive Probabilistic and Differentiable Programs
Feb 21, 2023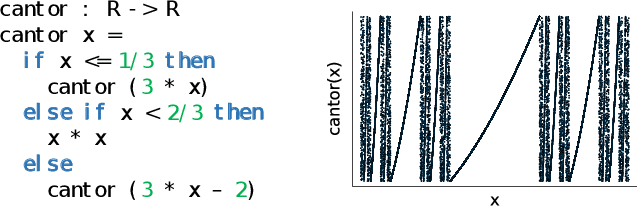
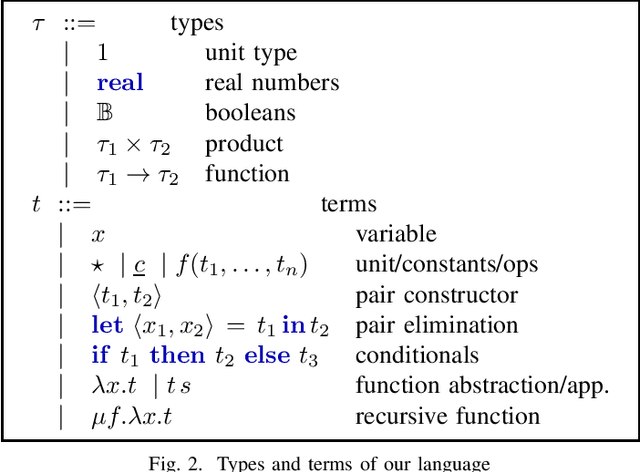
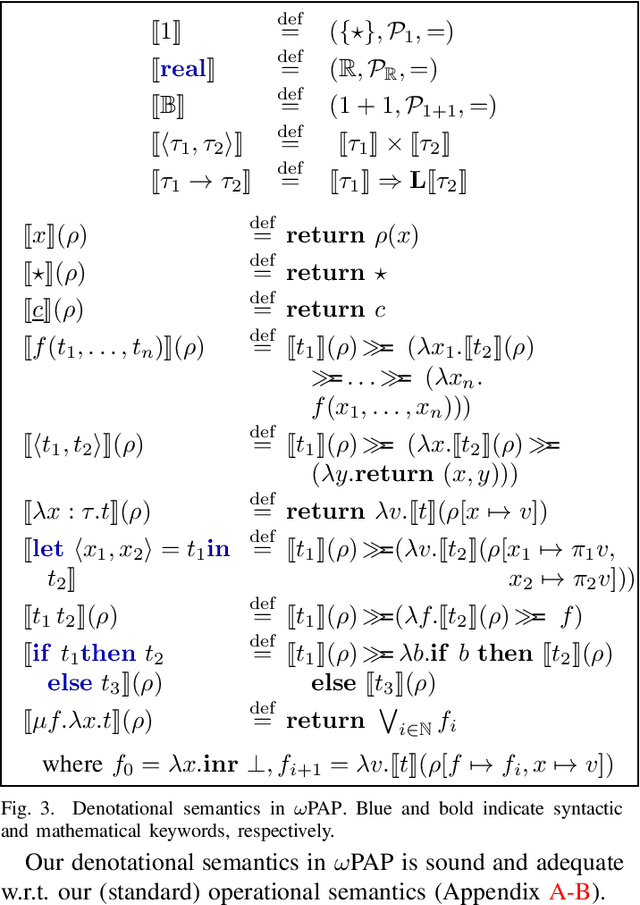
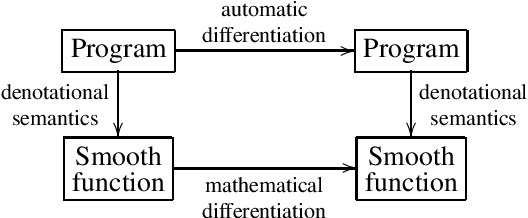
We introduce a new setting, the category of $\omega$PAP spaces, for reasoning denotationally about expressive differentiable and probabilistic programming languages. Our semantics is general enough to assign meanings to most practical probabilistic and differentiable programs, including those that use general recursion, higher-order functions, discontinuous primitives, and both discrete and continuous sampling. But crucially, it is also specific enough to exclude many pathological denotations, enabling us to establish new results about both deterministic differentiable programs and probabilistic programs. In the deterministic setting, we prove very general correctness theorems for automatic differentiation and its use within gradient descent. In the probabilistic setting, we establish the almost-everywhere differentiability of probabilistic programs' trace density functions, and the existence of convenient base measures for density computation in Monte Carlo inference. In some cases these results were previously known, but required detailed proofs with an operational flavor; by contrast, all our proofs work directly with programs' denotations.
3D Neural Embedding Likelihood for Robust Sim-to-Real Transfer in Inverse Graphics
Feb 07, 2023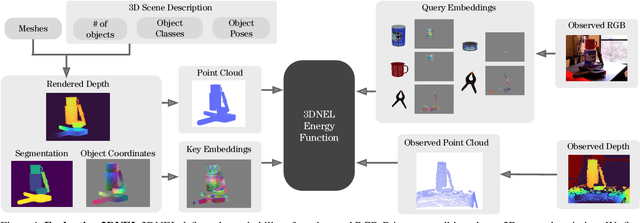
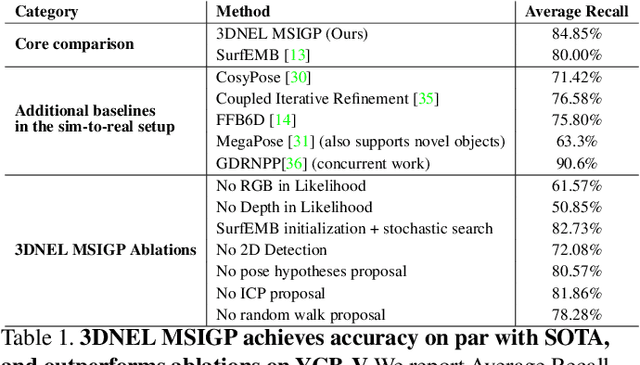
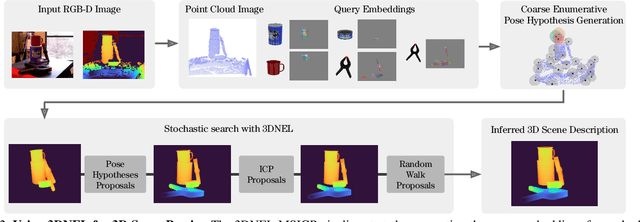
A central challenge in 3D scene perception via inverse graphics is robustly modeling the gap between 3D graphics and real-world data. We propose a novel 3D Neural Embedding Likelihood (3DNEL) over RGB-D images to address this gap. 3DNEL uses neural embeddings to predict 2D-3D correspondences from RGB and combines this with depth in a principled manner. 3DNEL is trained entirely from synthetic images and generalizes to real-world data. To showcase this capability, we develop a multi-stage inverse graphics pipeline that uses 3DNEL for 6D object pose estimation from real RGB-D images. Our method outperforms the previous state-of-the-art in sim-to-real pose estimation on the YCB-Video dataset, and improves robustness, with significantly fewer large-error predictions. Unlike existing bottom-up, discriminative approaches that are specialized for pose estimation, 3DNEL adopts a probabilistic generative formulation that jointly models multi-object scenes. This generative formulation enables easy extension of 3DNEL to additional tasks like object and camera tracking from video, using principled inference in the same probabilistic model without task specific retraining.