 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplementary Reinforcement Learning
Mar 18, 2026Reinforcement Learning (RL) has emerged as a powerful paradigm for training LLM-based agents, yet remains limited by low sample efficiency, stemming not only from sparse outcome feedback but also from the agent's inability to leverage prior experience across episodes. While augmenting agents with historical experience offers a promising remedy, existing approaches suffer from a critical weakness: the experience distilled from history is either stored statically or fail to coevolve with the improving actor, causing a progressive misalignment between the experience and the actor's evolving capability that diminishes its utility over the course of training. Inspired by complementary learning systems in neuroscience, we present Complementary RL to achieve seamless co-evolution of an experience extractor and a policy actor within the RL optimization loop. Specifically, the actor is optimized via sparse outcome-based rewards, while the experience extractor is optimized according to whether its distilled experiences demonstrably contribute to the actor's success, thereby evolving its experience management strategy in lockstep with the actor's growing capabilities. Empirically, Complementary RL outperforms outcome-based agentic RL baselines that do not learn from experience, achieving 10% performance improvement in single-task scenarios and exhibits robust scalability in multi-task settings. These results establish Complementary RL as a paradigm for efficient experience-driven agent learning.
Alleviating Sparse Rewards by Modeling Step-Wise and Long-Term Sampling Effects in Flow-Based GRPO
Feb 06, 2026Deploying GRPO on Flow Matching models has proven effective for text-to-image generation. However, existing paradigms typically propagate an outcome-based reward to all preceding denoising steps without distinguishing the local effect of each step. Moreover, current group-wise ranking mainly compares trajectories at matched timesteps and ignores within-trajectory dependencies, where certain early denoising actions can affect later states via delayed, implicit interactions. We propose TurningPoint-GRPO (TP-GRPO), a GRPO framework that alleviates step-wise reward sparsity and explicitly models long-term effects within the denoising trajectory. TP-GRPO makes two key innovations: (i) it replaces outcome-based rewards with step-level incremental rewards, providing a dense, step-aware learning signal that better isolates each denoising action's "pure" effect, and (ii) it identifies turning points-steps that flip the local reward trend and make subsequent reward evolution consistent with the overall trajectory trend-and assigns these actions an aggregated long-term reward to capture their delayed impact. Turning points are detected solely via sign changes in incremental rewards, making TP-GRPO efficient and hyperparameter-free. Extensive experiments also demonstrate that TP-GRPO exploits reward signals more effectively and consistently improves generation. Demo code is available at https://github.com/YunzeTong/TurningPoint-GRPO.
Let It Flow: Agentic Crafting on Rock and Roll, Building the ROME Model within an Open Agentic Learning Ecosystem
Dec 31, 2025Agentic crafting requires LLMs to operate in real-world environments over multiple turns by taking actions, observing outcomes, and iteratively refining artifacts. Despite its importance, the open-source community lacks a principled, end-to-end ecosystem to streamline agent development. We introduce the Agentic Learning Ecosystem (ALE), a foundational infrastructure that optimizes the production pipeline for agent LLMs. ALE consists of three components: ROLL, a post-training framework for weight optimization; ROCK, a sandbox environment manager for trajectory generation; and iFlow CLI, an agent framework for efficient context engineering. We release ROME (ROME is Obviously an Agentic Model), an open-source agent grounded by ALE and trained on over one million trajectories. Our approach includes data composition protocols for synthesizing complex behaviors and a novel policy optimization algorithm, Interaction-based Policy Alignment (IPA), which assigns credit over semantic interaction chunks rather than individual tokens to improve long-horizon training stability. Empirically, we evaluate ROME within a structured setting and introduce Terminal Bench Pro, a benchmark with improved scale and contamination control. ROME demonstrates strong performance across benchmarks like SWE-bench Verified and Terminal Bench, proving the effectiveness of the ALE infrastructure.
AMAP Agentic Planning Technical Report
Dec 31, 2025We present STAgent, an agentic large language model tailored for spatio-temporal understanding, designed to solve complex tasks such as constrained point-of-interest discovery and itinerary planning. STAgent is a specialized model capable of interacting with ten distinct tools within spatio-temporal scenarios, enabling it to explore, verify, and refine intermediate steps during complex reasoning. Notably, STAgent effectively preserves its general capabilities. We empower STAgent with these capabilities through three key contributions: (1) a stable tool environment that supports over ten domain-specific tools, enabling asynchronous rollout and training; (2) a hierarchical data curation framework that identifies high-quality data like a needle in a haystack, curating high-quality queries with a filter ratio of 1:10,000, emphasizing both diversity and difficulty; and (3) a cascaded training recipe that starts with a seed SFT stage acting as a guardian to measure query difficulty, followed by a second SFT stage fine-tuned on queries with high certainty, and an ultimate RL stage that leverages data of low certainty. Initialized with Qwen3-30B-A3B to establish a strong SFT foundation and leverage insights into sample difficulty, STAgent yields promising performance on TravelBench while maintaining its general capabilities across a wide range of general benchmarks, thereby demonstrating the effectiveness of our proposed agentic model.
RollArt: Scaling Agentic RL Training via Disaggregated Infrastructure
Dec 27, 2025Agentic Reinforcement Learning (RL) enables Large Language Models (LLMs) to perform autonomous decision-making and long-term planning. Unlike standard LLM post-training, agentic RL workloads are highly heterogeneous, combining compute-intensive prefill phases, bandwidth-bound decoding, and stateful, CPU-heavy environment simulations. We argue that efficient agentic RL training requires disaggregated infrastructure to leverage specialized, best-fit hardware. However, naive disaggregation introduces substantial synchronization overhead and resource underutilization due to the complex dependencies between stages. We present RollArc, a distributed system designed to maximize throughput for multi-task agentic RL on disaggregated infrastructure. RollArc is built on three core principles: (1) hardware-affinity workload mapping, which routes compute-bound and bandwidth-bound tasks to bestfit GPU devices, (2) fine-grained asynchrony, which manages execution at the trajectory level to mitigate resource bubbles, and (3) statefulness-aware computation, which offloads stateless components (e.g., reward models) to serverless infrastructure for elastic scaling. Our results demonstrate that RollArc effectively improves training throughput and achieves 1.35-2.05\(\times\) end-to-end training time reduction compared to monolithic and synchronous baselines. We also evaluate RollArc by training a hundreds-of-billions-parameter MoE model for Qoder product on an Alibaba cluster with more than 3,000 GPUs, further demonstrating RollArc scalability and robustness. The code is available at https://github.com/alibaba/ROLL.
Part I: Tricks or Traps? A Deep Dive into RL for LLM Reasoning
Aug 11, 2025Reinforcement learning for LLM reasoning has rapidly emerged as a prominent research area, marked by a significant surge in related studies on both algorithmic innovations and practical applications. Despite this progress, several critical challenges remain, including the absence of standardized guidelines for employing RL techniques and a fragmented understanding of their underlying mechanisms. Additionally, inconsistent experimental settings, variations in training data, and differences in model initialization have led to conflicting conclusions, obscuring the key characteristics of these techniques and creating confusion among practitioners when selecting appropriate techniques. This paper systematically reviews widely adopted RL techniques through rigorous reproductions and isolated evaluations within a unified open-source framework. We analyze the internal mechanisms, applicable scenarios, and core principles of each technique through fine-grained experiments, including datasets of varying difficulty, model sizes, and architectures. Based on these insights, we present clear guidelines for selecting RL techniques tailored to specific setups, and provide a reliable roadmap for practitioners navigating the RL for the LLM domain. Finally, we reveal that a minimalist combination of two techniques can unlock the learning capability of critic-free policies using vanilla PPO loss. The results demonstrate that our simple combination consistently improves performance, surpassing strategies like GRPO and DAPO.
RecGPT Technical Report
Jul 30, 2025



Recommender systems are among the most impactful applications of artificial intelligence, serving as critical infrastructure connecting users, merchants, and platforms. However, most current industrial systems remain heavily reliant on historical co-occurrence patterns and log-fitting objectives, i.e., optimizing for past user interactions without explicitly modeling user intent. This log-fitting approach often leads to overfitting to narrow historical preferences, failing to capture users' evolving and latent interests. As a result, it reinforces filter bubbles and long-tail phenomena, ultimately harming user experience and threatening the sustainability of the whole recommendation ecosystem. To address these challenges, we rethink the overall design paradigm of recommender systems and propose RecGPT, a next-generation framework that places user intent at the center of the recommendation pipeline. By integrating large language models (LLMs) into key stages of user interest mining, item retrieval, and explanation generation, RecGPT transforms log-fitting recommendation into an intent-centric process. To effectively align general-purpose LLMs to the above domain-specific recommendation tasks at scale, RecGPT incorporates a multi-stage training paradigm, which integrates reasoning-enhanced pre-alignment and self-training evolution, guided by a Human-LLM cooperative judge system. Currently, RecGPT has been fully deployed on the Taobao App. Online experiments demonstrate that RecGPT achieves consistent performance gains across stakeholders: users benefit from increased content diversity and satisfaction, merchants and the platform gain greater exposure and conversions. These comprehensive improvement results across all stakeholders validates that LLM-driven, intent-centric design can foster a more sustainable and mutually beneficial recommendation ecosystem.
MOFSimBench: Evaluating Universal Machine Learning Interatomic Potentials In Metal--Organic Framework Molecular Modeling
Jul 16, 2025Universal machine learning interatomic potentials (uMLIPs) have emerged as powerful tools for accelerating atomistic simulations, offering scalable and efficient modeling with accuracy close to quantum calculations. However, their reliability and effectiveness in practical, real-world applications remain an open question. Metal-organic frameworks (MOFs) and related nanoporous materials are highly porous crystals with critical relevance in carbon capture, energy storage, and catalysis applications. Modeling nanoporous materials presents distinct challenges for uMLIPs due to their diverse chemistry, structural complexity, including porosity and coordination bonds, and the absence from existing training datasets. Here, we introduce MOFSimBench, a benchmark to evaluate uMLIPs on key materials modeling tasks for nanoporous materials, including structural optimization, molecular dynamics (MD) stability, the prediction of bulk properties, such as bulk modulus and heat capacity, and guest-host interactions. Evaluating over 20 models from various architectures on a chemically and structurally diverse materials set, we find that top-performing uMLIPs consistently outperform classical force fields and fine-tuned machine learning potentials across all tasks, demonstrating their readiness for deployment in nanoporous materials modeling. Our analysis highlights that data quality, particularly the diversity of training sets and inclusion of out-of-equilibrium conformations, plays a more critical role than model architecture in determining performance across all evaluated uMLIPs. We release our modular and extendable benchmarking framework at https://github.com/AI4ChemS/mofsim-bench, providing an open resource to guide the adoption for nanoporous materials modeling and further development of uMLIPs.
Reinforcement Learning Optimization for Large-Scale Learning: An Efficient and User-Friendly Scaling Library
Jun 06, 2025We introduce ROLL, an efficient, scalable, and user-friendly library designed for Reinforcement Learning Optimization for Large-scale Learning. ROLL caters to three primary user groups: tech pioneers aiming for cost-effective, fault-tolerant large-scale training, developers requiring flexible control over training workflows, and researchers seeking agile experimentation. ROLL is built upon several key modules to serve these user groups effectively. First, a single-controller architecture combined with an abstraction of the parallel worker simplifies the development of the training pipeline. Second, the parallel strategy and data transfer modules enable efficient and scalable training. Third, the rollout scheduler offers fine-grained management of each sample's lifecycle during the rollout stage. Fourth, the environment worker and reward worker support rapid and flexible experimentation with agentic RL algorithms and reward designs. Finally, AutoDeviceMapping allows users to assign resources to different models flexibly across various stages.
Mamba-FETrack: Frame-Event Tracking via State Space Model
Apr 28, 2024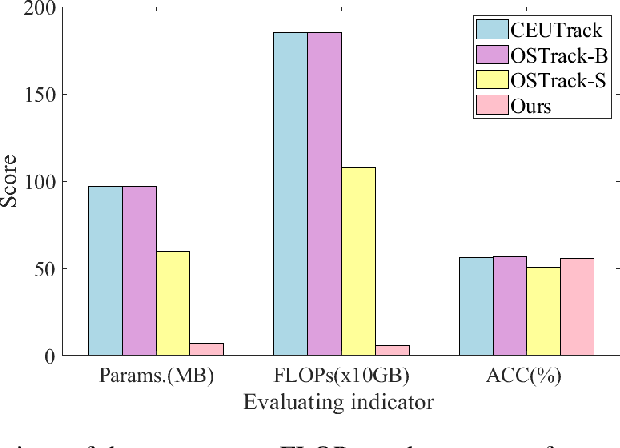
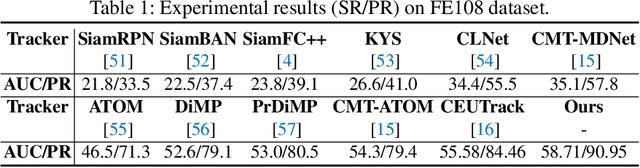
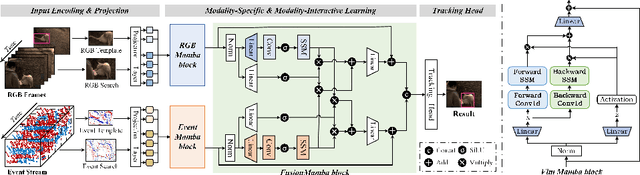
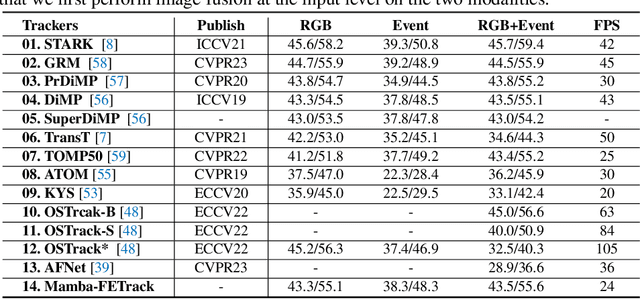
RGB-Event based tracking is an emerging research topic, focusing on how to effectively integrate heterogeneous multi-modal data (synchronized exposure video frames and asynchronous pulse Event stream). Existing works typically employ Transformer based networks to handle these modalities and achieve decent accuracy through input-level or feature-level fusion on multiple datasets. However, these trackers require significant memory consumption and computational complexity due to the use of self-attention mechanism. This paper proposes a novel RGB-Event tracking framework, Mamba-FETrack, based on the State Space Model (SSM) to achieve high-performance tracking while effectively reducing computational costs and realizing more efficient tracking. Specifically, we adopt two modality-specific Mamba backbone networks to extract the features of RGB frames and Event streams. Then, we also propose to boost the interactive learning between the RGB and Event features using the Mamba network. The fused features will be fed into the tracking head for target object localization. Extensive experiments on FELT and FE108 datasets fully validated the efficiency and effectiveness of our proposed tracker. Specifically, our Mamba-based tracker achieves 43.5/55.6 on the SR/PR metric, while the ViT-S based tracker (OSTrack) obtains 40.0/50.9. The GPU memory cost of ours and ViT-S based tracker is 13.98GB and 15.44GB, which decreased about $9.5\%$. The FLOPs and parameters of ours/ViT-S based OSTrack are 59GB/1076GB and 7MB/60MB, which decreased about $94.5\%$ and $88.3\%$, respectively. We hope this work can bring some new insights to the tracking field and greatly promote the application of the Mamba architecture in tracking. The source code of this work will be released on \url{https://github.com/Event-AHU/Mamba_FETrack}.