 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJack of All Trades, Master of Some, a Multi-Purpose Transformer Agent
Feb 15, 2024
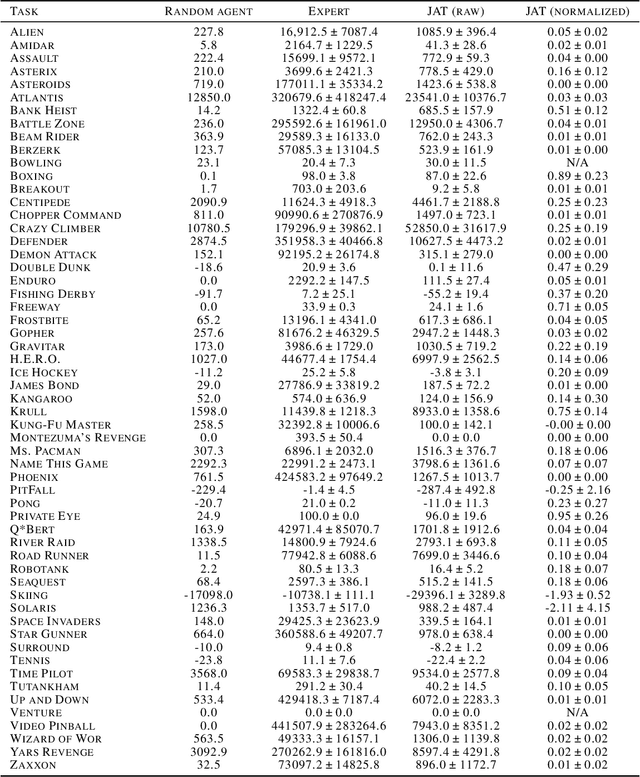


The search for a general model that can operate seamlessly across multiple domains remains a key goal in machine learning research. The prevailing methodology in Reinforcement Learning (RL) typically limits models to a single task within a unimodal framework, a limitation that contrasts with the broader vision of a versatile, multi-domain model. In this paper, we present Jack of All Trades (JAT), a transformer-based model with a unique design optimized for handling sequential decision-making tasks and multimodal data types. The JAT model demonstrates its robust capabilities and versatility by achieving strong performance on very different RL benchmarks, along with promising results on Computer Vision (CV) and Natural Language Processing (NLP) tasks, all using a single set of weights. The JAT model marks a significant step towards more general, cross-domain AI model design, and notably, it is the first model of its kind to be fully open-sourced (see https://huggingface.co/jat-project/jat), including a pioneering general-purpose dataset.
Zephyr: Direct Distillation of LM Alignment
Oct 25, 2023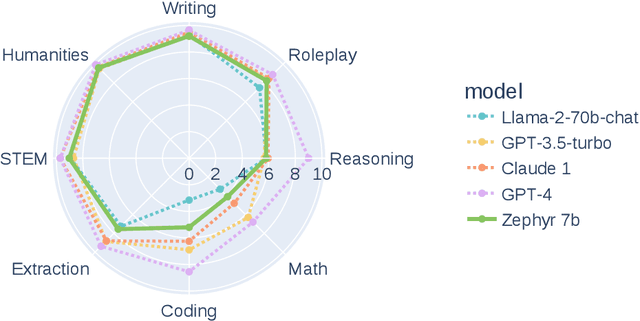
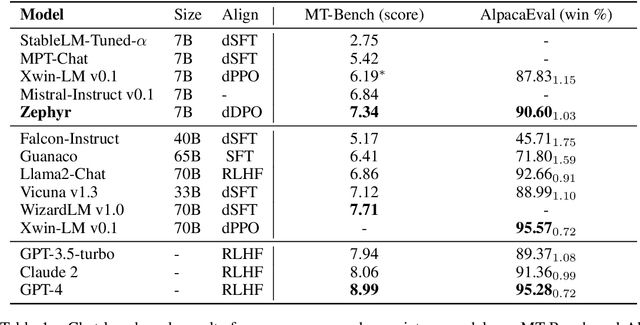
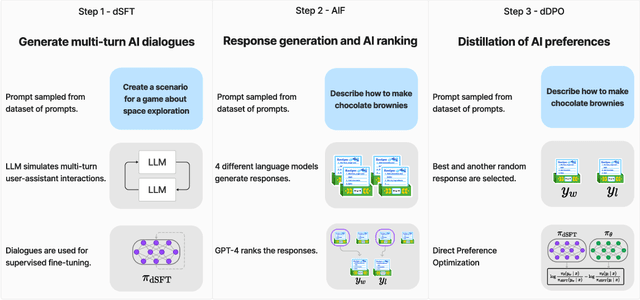
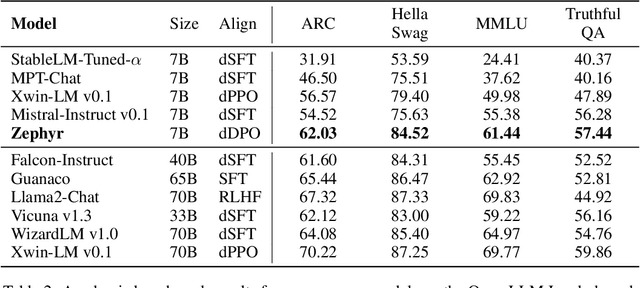
We aim to produce a smaller language model that is aligned to user intent. Previous research has shown that applying distilled supervised fine-tuning (dSFT) on larger models significantly improves task accuracy; however, these models are unaligned, i.e. they do not respond well to natural prompts. To distill this property, we experiment with the use of preference data from AI Feedback (AIF). Starting from a dataset of outputs ranked by a teacher model, we apply distilled direct preference optimization (dDPO) to learn a chat model with significantly improved intent alignment. The approach requires only a few hours of training without any additional sampling during fine-tuning. The final result, Zephyr-7B, sets the state-of-the-art on chat benchmarks for 7B parameter models, and requires no human annotation. In particular, results on MT-Bench show that Zephyr-7B surpasses Llama2-Chat-70B, the best open-access RLHF-based model. Code, models, data, and tutorials for the system are available at https://github.com/huggingface/alignment-handbook.
Graph augmented Deep Reinforcement Learning in the GameRLand3D environment
Dec 22, 2021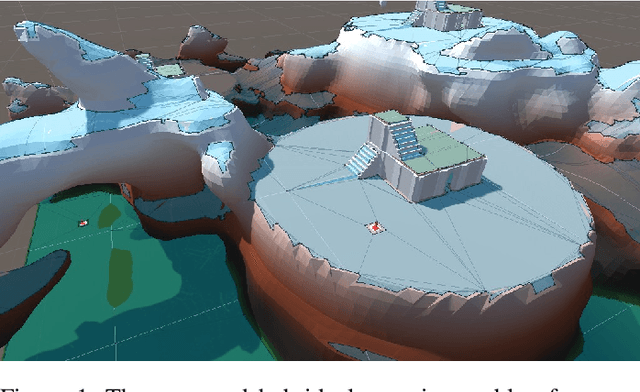

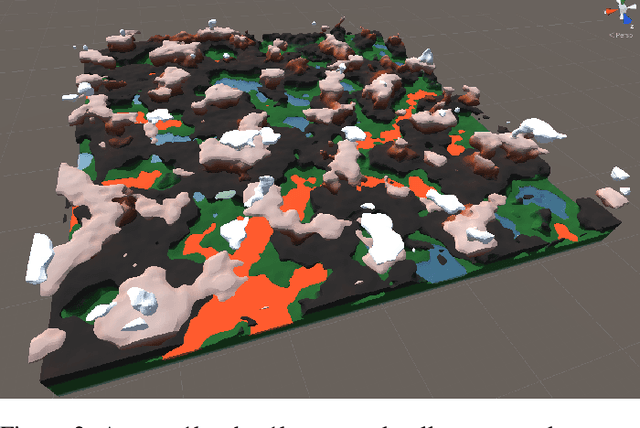

We address planning and navigation in challenging 3D video games featuring maps with disconnected regions reachable by agents using special actions. In this setting, classical symbolic planners are not applicable or difficult to adapt. We introduce a hybrid technique combining a low level policy trained with reinforcement learning and a graph based high level classical planner. In addition to providing human-interpretable paths, the approach improves the generalization performance of an end-to-end approach in unseen maps, where it achieves a 20% absolute increase in success rate over a recurrent end-to-end agent on a point to point navigation task in yet unseen large-scale maps of size 1km x 1km. In an in-depth experimental study, we quantify the limitations of end-to-end Deep RL approaches in vast environments and we also introduce "GameRLand3D", a new benchmark and soon to be released environment can generate complex procedural 3D maps for navigation tasks.
Godot Reinforcement Learning Agents
Dec 07, 2021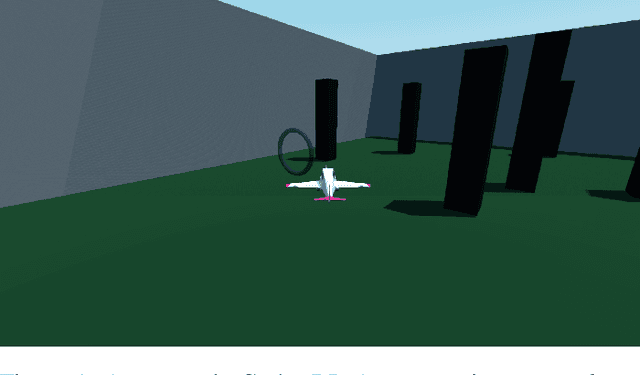
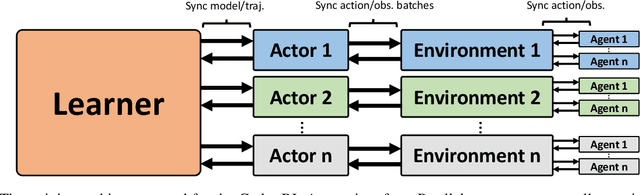
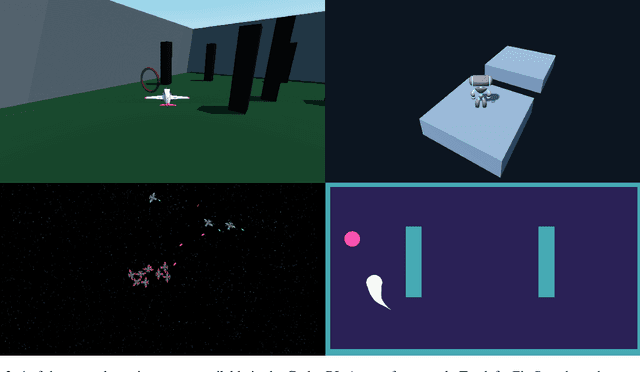
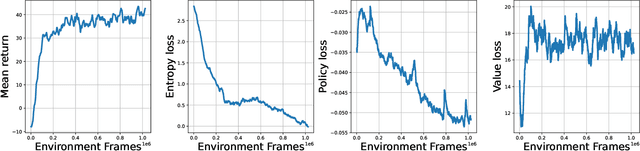
We present Godot Reinforcement Learning (RL) Agents, an open-source interface for developing environments and agents in the Godot Game Engine. The Godot RL Agents interface allows the design, creation and learning of agent behaviors in challenging 2D and 3D environments with various on-policy and off-policy Deep RL algorithms. We provide a standard Gym interface, with wrappers for learning in the Ray RLlib and Stable Baselines RL frameworks. This allows users access to over 20 state of the art on-policy, off-policy and multi-agent RL algorithms. The framework is a versatile tool that allows researchers and game designers the ability to create environments with discrete, continuous and mixed action spaces. The interface is relatively performant, with 12k interactions per second on a high end laptop computer, when parallized on 4 CPU cores. An overview video is available here: https://youtu.be/g1MlZSFqIj4
Learning to plan with uncertain topological maps
Jul 10, 2020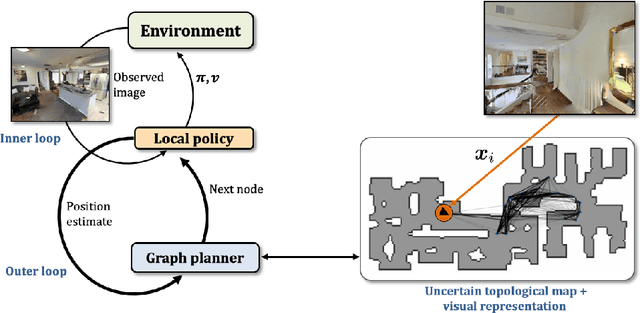
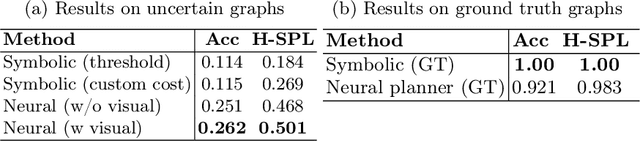
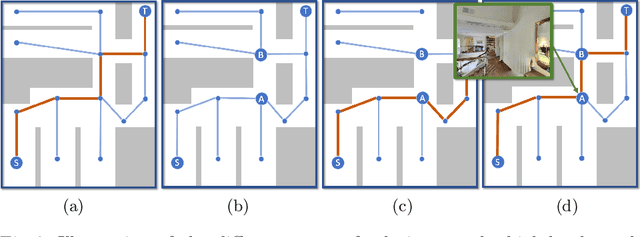
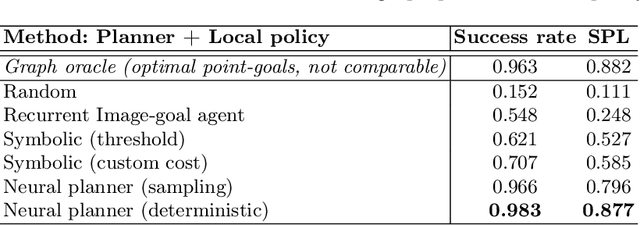
We train an agent to navigate in 3D environments using a hierarchical strategy including a high-level graph based planner and a local policy. Our main contribution is a data driven learning based approach for planning under uncertainty in topological maps, requiring an estimate of shortest paths in valued graphs with a probabilistic structure. Whereas classical symbolic algorithms achieve optimal results on noise-less topologies, or optimal results in a probabilistic sense on graphs with probabilistic structure, we aim to show that machine learning can overcome missing information in the graph by taking into account rich high-dimensional node features, for instance visual information available at each location of the map. Compared to purely learned neural white box algorithms, we structure our neural model with an inductive bias for dynamic programming based shortest path algorithms, and we show that a particular parameterization of our neural model corresponds to the Bellman-Ford algorithm. By performing an empirical analysis of our method in simulated photo-realistic 3D environments, we demonstrate that the inclusion of visual features in the learned neural planner outperforms classical symbolic solutions for graph based planning.
EgoMap: Projective mapping and structured egocentric memory for Deep RL
Feb 07, 2020
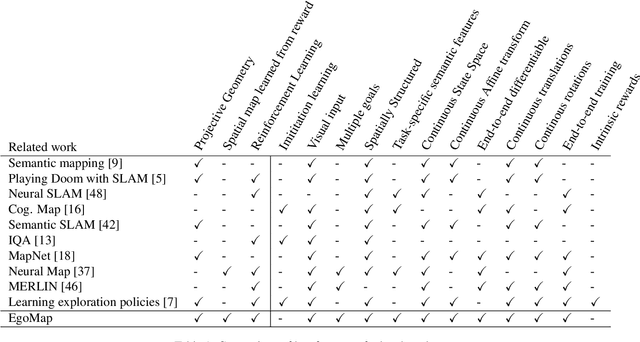

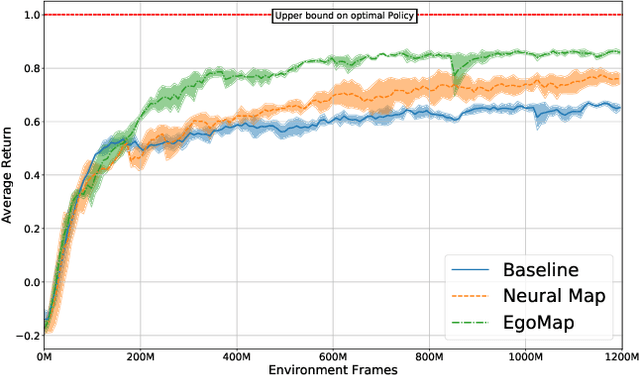
Tasks involving localization, memorization and planning in partially observable 3D environments are an ongoing challenge in Deep Reinforcement Learning. We present EgoMap, a spatially structured neural memory architecture. EgoMap augments a deep reinforcement learning agent's performance in 3D environments on challenging tasks with multi-step objectives. The EgoMap architecture incorporates several inductive biases including a differentiable inverse projection of CNN feature vectors onto a top-down spatially structured map. The map is updated with ego-motion measurements through a differentiable affine transform. We show this architecture outperforms both standard recurrent agents and state of the art agents with structured memory. We demonstrate that incorporating these inductive biases into an agent's architecture allows for stable training with reward alone, circumventing the expense of acquiring and labelling expert trajectories. A detailed ablation study demonstrates the impact of key aspects of the architecture and through extensive qualitative analysis, we show how the agent exploits its structured internal memory to achieve higher performance.
Deep Reinforcement Learning on a Budget: 3D Control and Reasoning Without a Supercomputer
Apr 03, 2019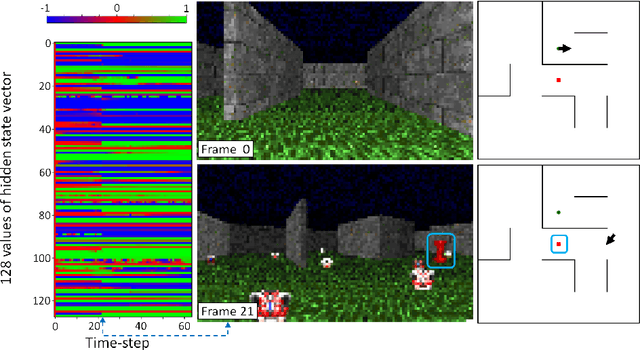
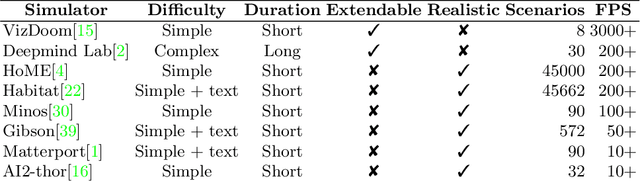
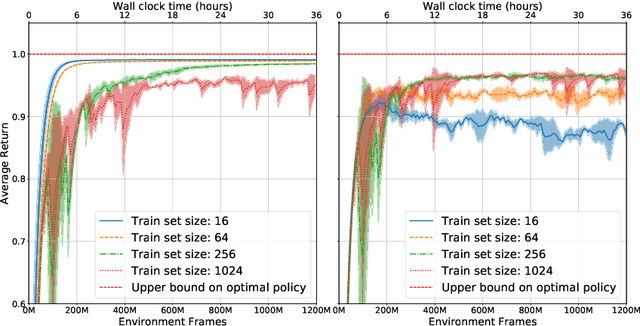
An important goal of research in Deep Reinforcement Learning in mobile robotics is to train agents capable of solving complex tasks, which require a high level of scene understanding and reasoning from an egocentric perspective. When trained from simulations, optimal environments should satisfy a currently unobtainable combination of high-fidelity photographic observations, massive amounts of different environment configurations and fast simulation speeds. In this paper we argue that research on training agents capable of complex reasoning can be simplified by decoupling from the requirement of high fidelity photographic observations. We present a suite of tasks requiring complex reasoning and exploration in continuous, partially observable 3D environments. The objective is to provide challenging scenarios and a robust baseline agent architecture that can be trained on mid-range consumer hardware in under 24h. Our scenarios combine two key advantages: (i) they are based on a simple but highly efficient 3D environment (ViZDoom) which allows high speed simulation (12000fps); (ii) the scenarios provide the user with a range of difficulty settings, in order to identify the limitations of current state of the art algorithms and network architectures. We aim to increase accessibility to the field of Deep-RL by providing baselines for challenging scenarios where new ideas can be iterated on quickly. We argue that the community should be able to address challenging problems in reasoning of mobile agents without the need for a large compute infrastructure.