 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph augmented Deep Reinforcement Learning in the GameRLand3D environment
Dec 22, 2021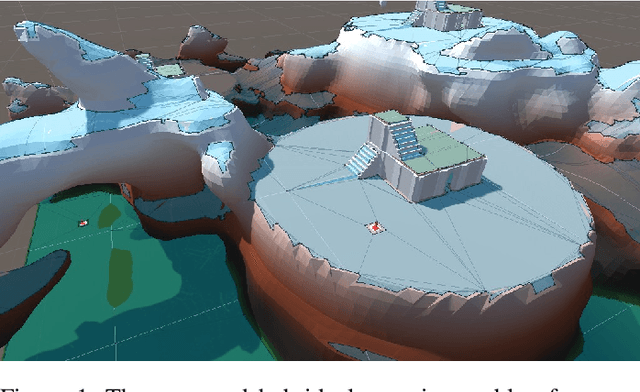

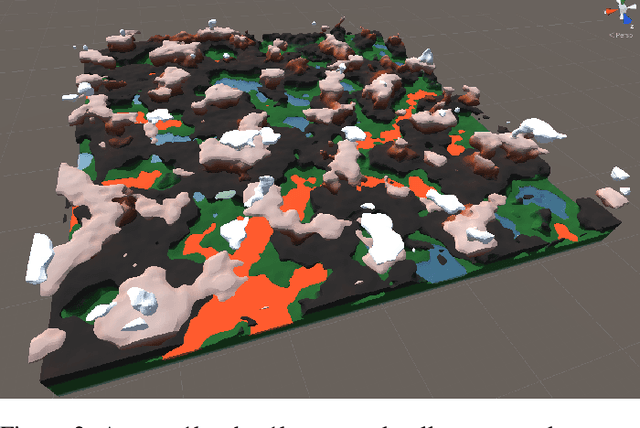

We address planning and navigation in challenging 3D video games featuring maps with disconnected regions reachable by agents using special actions. In this setting, classical symbolic planners are not applicable or difficult to adapt. We introduce a hybrid technique combining a low level policy trained with reinforcement learning and a graph based high level classical planner. In addition to providing human-interpretable paths, the approach improves the generalization performance of an end-to-end approach in unseen maps, where it achieves a 20% absolute increase in success rate over a recurrent end-to-end agent on a point to point navigation task in yet unseen large-scale maps of size 1km x 1km. In an in-depth experimental study, we quantify the limitations of end-to-end Deep RL approaches in vast environments and we also introduce "GameRLand3D", a new benchmark and soon to be released environment can generate complex procedural 3D maps for navigation tasks.
Godot Reinforcement Learning Agents
Dec 07, 2021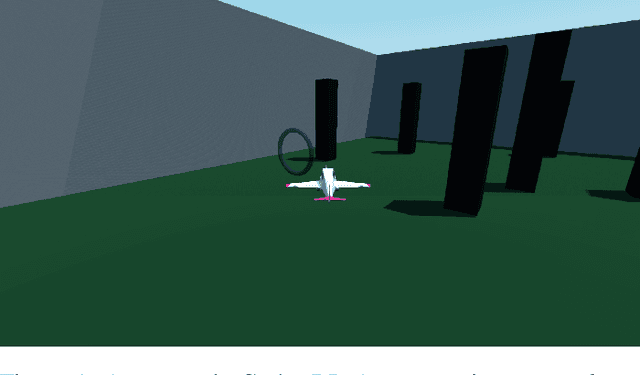
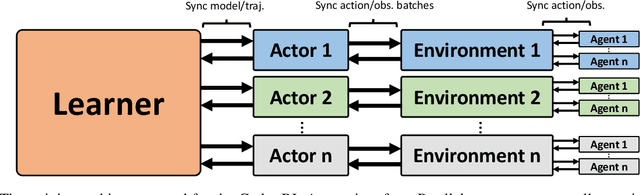
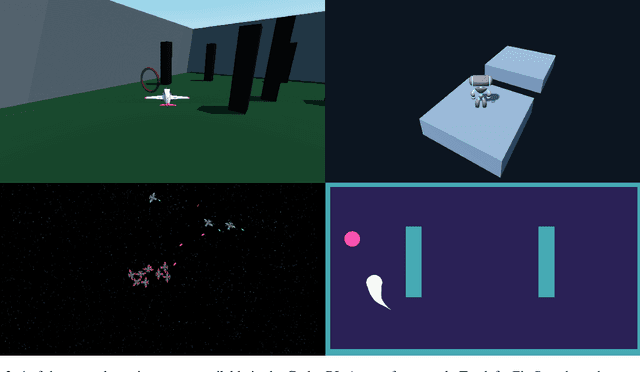
We present Godot Reinforcement Learning (RL) Agents, an open-source interface for developing environments and agents in the Godot Game Engine. The Godot RL Agents interface allows the design, creation and learning of agent behaviors in challenging 2D and 3D environments with various on-policy and off-policy Deep RL algorithms. We provide a standard Gym interface, with wrappers for learning in the Ray RLlib and Stable Baselines RL frameworks. This allows users access to over 20 state of the art on-policy, off-policy and multi-agent RL algorithms. The framework is a versatile tool that allows researchers and game designers the ability to create environments with discrete, continuous and mixed action spaces. The interface is relatively performant, with 12k interactions per second on a high end laptop computer, when parallized on 4 CPU cores. An overview video is available here: https://youtu.be/g1MlZSFqIj4