 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAMEL: Continuous Action Masking Enabled by Large Language Models for Reinforcement Learning
Feb 17, 2025

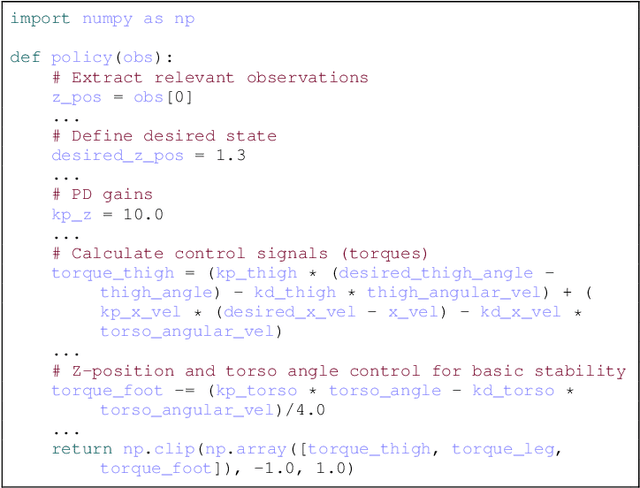

Reinforcement learning (RL) in continuous action spaces encounters persistent challenges, such as inefficient exploration and convergence to suboptimal solutions. To address these limitations, we propose CAMEL, a novel framework integrating LLM-generated suboptimal policies into the RL training pipeline. CAMEL leverages dynamic action masking and an adaptive epsilon-masking mechanism to guide exploration during early training stages while gradually enabling agents to optimize policies independently. At the core of CAMEL lies the integration of Python-executable suboptimal policies generated by LLMs based on environment descriptions and task objectives. Although simplistic and hard-coded, these policies offer valuable initial guidance for RL agents. To effectively utilize these priors, CAMEL employs masking-aware optimization to dynamically constrain the action space based on LLM outputs. Additionally, epsilon-masking gradually reduces reliance on LLM-generated guidance, enabling agents to transition from constrained exploration to autonomous policy refinement. Experimental validation on Gymnasium MuJoCo environments demonstrates the effectiveness of CAMEL. In Hopper-v4 and Ant-v4, LLM-generated policies significantly improve sample efficiency, achieving performance comparable to or surpassing expert masking baselines. For Walker2d-v4, where LLMs struggle to accurately model bipedal gait dynamics, CAMEL maintains robust RL performance without notable degradation, highlighting the framework's adaptability across diverse tasks. While CAMEL shows promise in enhancing sample efficiency and mitigating convergence challenges, these issues remain open for further research. Future work aims to generalize CAMEL to multimodal LLMs for broader observation-action spaces and automate policy evaluation, reducing human intervention and enhancing scalability in RL training pipelines.
Snapshot Reinforcement Learning: Leveraging Prior Trajectories for Efficiency
Mar 12, 2024



Deep reinforcement learning (DRL) algorithms require substantial samples and computational resources to achieve higher performance, which restricts their practical application and poses challenges for further development. Given the constraint of limited resources, it is essential to leverage existing computational work (e.g., learned policies, samples) to enhance sample efficiency and reduce the computational resource consumption of DRL algorithms. Previous works to leverage existing computational work require intrusive modifications to existing algorithms and models, designed specifically for specific algorithms, lacking flexibility and universality. In this paper, we present the Snapshot Reinforcement Learning (SnapshotRL) framework, which enhances sample efficiency by simply altering environments, without making any modifications to algorithms and models. By allowing student agents to choose states in teacher trajectories as the initial state to sample, SnapshotRL can effectively utilize teacher trajectories to assist student agents in training, allowing student agents to explore a larger state space at the early training phase. We propose a simple and effective SnapshotRL baseline algorithm, S3RL, which integrates well with existing DRL algorithms. Our experiments demonstrate that integrating S3RL with TD3, SAC, and PPO algorithms on the MuJoCo benchmark significantly improves sample efficiency and average return, without extra samples and additional computational resources.