 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelaxing Anchor-Frame Dominance for Mitigating Hallucinations in Video Large Language Models
Apr 14, 2026Recent Video Large Language Models (Video-LLMs) have demonstrated strong capability in video understanding, yet they still suffer from hallucinations. Existing mitigation methods typically rely on training, input modification, auxiliary guidance, or additional decoding procedures, while largely overlooking a more fundamental challenge. During generation, Video-LLMs tend to over-rely on a limited portion of temporal evidence, leading to temporally imbalanced evidence aggregation across the video. To address this issue, we investigate a decoder-side phenomenon in which the model exhibits a temporally imbalanced concentration pattern. We term the frame with the highest aggregated frame-level attention mass the anchor frame. We find that this bias is largely independent of the input video and instead appears to reflect a persistent, model-specific structural or positional bias, whose over-dominance is closely associated with hallucination-prone generation. Motivated by this insight, we propose Decoder-side Temporal Rebalancing (DTR), a training-free, layer-selective inference method that rebalances temporal evidence allocation in middle-to-late decoder layers without altering visual encoding or requiring auxiliary models. DTR adaptively calibrates decoder-side visual attention to alleviate temporally imbalanced concentration and encourage under-attended frames to contribute more effectively to response generation. In this way, DTR guides the decoder to ground its outputs in temporally broader and more balanced video evidence. Extensive experiments on hallucination and video understanding benchmarks show that DTR consistently improves hallucination robustness across diverse Video-LLM families, while preserving competitive video understanding performance and high inference efficiency.
Interaction-Aware 4D Gaussian Splatting for Dynamic Hand-Object Interaction Reconstruction
Nov 18, 2025This paper focuses on a challenging setting of simultaneously modeling geometry and appearance of hand-object interaction scenes without any object priors. We follow the trend of dynamic 3D Gaussian Splatting based methods, and address several significant challenges. To model complex hand-object interaction with mutual occlusion and edge blur, we present interaction-aware hand-object Gaussians with newly introduced optimizable parameters aiming to adopt piecewise linear hypothesis for clearer structural representation. Moreover, considering the complementarity and tightness of hand shape and object shape during interaction dynamics, we incorporate hand information into object deformation field, constructing interaction-aware dynamic fields to model flexible motions. To further address difficulties in the optimization process, we propose a progressive strategy that handles dynamic regions and static background step by step. Correspondingly, explicit regularizations are designed to stabilize the hand-object representations for smooth motion transition, physical interaction reality, and coherent lighting. Experiments show that our approach surpasses existing dynamic 3D-GS-based methods and achieves state-of-the-art performance in reconstructing dynamic hand-object interaction.
Met$^2$Net: A Decoupled Two-Stage Spatio-Temporal Forecasting Model for Complex Meteorological Systems
Jul 23, 2025The increasing frequency of extreme weather events due to global climate change urges accurate weather prediction. Recently, great advances have been made by the \textbf{end-to-end methods}, thanks to deep learning techniques, but they face limitations of \textit{representation inconsistency} in multivariable integration and struggle to effectively capture the dependency between variables, which is required in complex weather systems. Treating different variables as distinct modalities and applying a \textbf{two-stage training approach} from multimodal models can partially alleviate this issue, but due to the inconformity in training tasks between the two stages, the results are often suboptimal. To address these challenges, we propose an implicit two-stage training method, configuring separate encoders and decoders for each variable. In detailed, in the first stage, the Translator is frozen while the Encoders and Decoders learn a shared latent space, in the second stage, the Encoders and Decoders are frozen, and the Translator captures inter-variable interactions for prediction. Besides, by introducing a self-attention mechanism for multivariable fusion in the latent space, the performance achieves further improvements. Empirically, extensive experiments show the state-of-the-art performance of our method. Specifically, it reduces the MSE for near-surface air temperature and relative humidity predictions by 28.82\% and 23.39\%, respectively. The source code is available at https://github.com/ShremG/Met2Net.
SRMambaV2: Biomimetic Attention for Sparse Point Cloud Upsampling in Autonomous Driving
Jul 23, 2025Upsampling LiDAR point clouds in autonomous driving scenarios remains a significant challenge due to the inherent sparsity and complex 3D structures of the data. Recent studies have attempted to address this problem by converting the complex 3D spatial scenes into 2D image super-resolution tasks. However, due to the sparse and blurry feature representation of range images, accurately reconstructing detailed and complex spatial topologies remains a major difficulty. To tackle this, we propose a novel sparse point cloud upsampling method named SRMambaV2, which enhances the upsampling accuracy in long-range sparse regions while preserving the overall geometric reconstruction quality. Specifically, inspired by human driver visual perception, we design a biomimetic 2D selective scanning self-attention (2DSSA) mechanism to model the feature distribution in distant sparse areas. Meanwhile, we introduce a dual-branch network architecture to enhance the representation of sparse features. In addition, we introduce a progressive adaptive loss (PAL) function to further refine the reconstruction of fine-grained details during the upsampling process. Experimental results demonstrate that SRMambaV2 achieves superior performance in both qualitative and quantitative evaluations, highlighting its effectiveness and practical value in automotive sparse point cloud upsampling tasks.
EfficientHuman: Efficient Training and Reconstruction of Moving Human using Articulated 2D Gaussian
Apr 29, 20253D Gaussian Splatting (3DGS) has been recognized as a pioneering technique in scene reconstruction and novel view synthesis. Recent work on reconstructing the 3D human body using 3DGS attempts to leverage prior information on human pose to enhance rendering quality and improve training speed. However, it struggles to effectively fit dynamic surface planes due to multi-view inconsistency and redundant Gaussians. This inconsistency arises because Gaussian ellipsoids cannot accurately represent the surfaces of dynamic objects, which hinders the rapid reconstruction of the dynamic human body. Meanwhile, the prevalence of redundant Gaussians means that the training time of these works is still not ideal for quickly fitting a dynamic human body. To address these, we propose EfficientHuman, a model that quickly accomplishes the dynamic reconstruction of the human body using Articulated 2D Gaussian while ensuring high rendering quality. The key innovation involves encoding Gaussian splats as Articulated 2D Gaussian surfels in canonical space and then transforming them to pose space via Linear Blend Skinning (LBS) to achieve efficient pose transformations. Unlike 3D Gaussians, Articulated 2D Gaussian surfels can quickly conform to the dynamic human body while ensuring view-consistent geometries. Additionally, we introduce a pose calibration module and an LBS optimization module to achieve precise fitting of dynamic human poses, enhancing the model's performance. Extensive experiments on the ZJU-MoCap dataset demonstrate that EfficientHuman achieves rapid 3D dynamic human reconstruction in less than a minute on average, which is 20 seconds faster than the current state-of-the-art method, while also reducing the number of redundant Gaussians.
CAMEL: Continuous Action Masking Enabled by Large Language Models for Reinforcement Learning
Feb 17, 2025

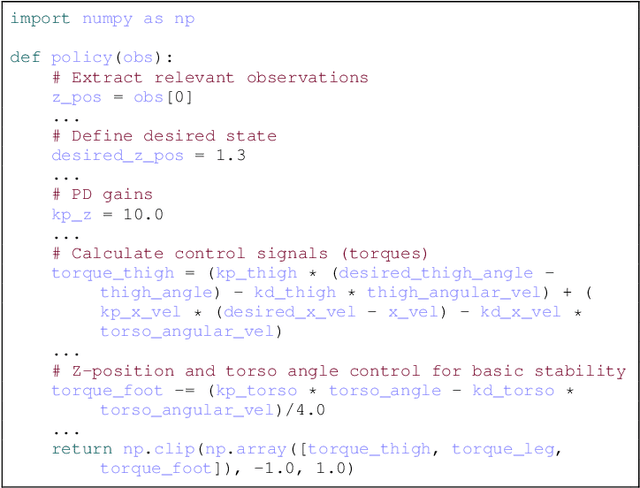

Reinforcement learning (RL) in continuous action spaces encounters persistent challenges, such as inefficient exploration and convergence to suboptimal solutions. To address these limitations, we propose CAMEL, a novel framework integrating LLM-generated suboptimal policies into the RL training pipeline. CAMEL leverages dynamic action masking and an adaptive epsilon-masking mechanism to guide exploration during early training stages while gradually enabling agents to optimize policies independently. At the core of CAMEL lies the integration of Python-executable suboptimal policies generated by LLMs based on environment descriptions and task objectives. Although simplistic and hard-coded, these policies offer valuable initial guidance for RL agents. To effectively utilize these priors, CAMEL employs masking-aware optimization to dynamically constrain the action space based on LLM outputs. Additionally, epsilon-masking gradually reduces reliance on LLM-generated guidance, enabling agents to transition from constrained exploration to autonomous policy refinement. Experimental validation on Gymnasium MuJoCo environments demonstrates the effectiveness of CAMEL. In Hopper-v4 and Ant-v4, LLM-generated policies significantly improve sample efficiency, achieving performance comparable to or surpassing expert masking baselines. For Walker2d-v4, where LLMs struggle to accurately model bipedal gait dynamics, CAMEL maintains robust RL performance without notable degradation, highlighting the framework's adaptability across diverse tasks. While CAMEL shows promise in enhancing sample efficiency and mitigating convergence challenges, these issues remain open for further research. Future work aims to generalize CAMEL to multimodal LLMs for broader observation-action spaces and automate policy evaluation, reducing human intervention and enhancing scalability in RL training pipelines.
STAA: Spatio-Temporal Alignment Attention for Short-Term Precipitation Forecasting
Sep 06, 2024There is a great need to accurately predict short-term precipitation, which has socioeconomic effects such as agriculture and disaster prevention. Recently, the forecasting models have employed multi-source data as the multi-modality input, thus improving the prediction accuracy. However, the prevailing methods usually suffer from the desynchronization of multi-source variables, the insufficient capability of capturing spatio-temporal dependency, and unsatisfactory performance in predicting extreme precipitation events. To fix these problems, we propose a short-term precipitation forecasting model based on spatio-temporal alignment attention, with SATA as the temporal alignment module and STAU as the spatio-temporal feature extractor to filter high-pass features from precipitation signals and capture multi-term temporal dependencies. Based on satellite and ERA5 data from the southwestern region of China, our model achieves improvements of 12.61\% in terms of RMSE, in comparison with the state-of-the-art methods.
Fourier Boundary Features Network with Wider Catchers for Glass Segmentation
May 15, 2024



Glass largely blurs the boundary between the real world and the reflection. The special transmittance and reflectance quality have confused the semantic tasks related to machine vision. Therefore, how to clear the boundary built by glass, and avoid over-capturing features as false positive information in deep structure, matters for constraining the segmentation of reflection surface and penetrating glass. We proposed the Fourier Boundary Features Network with Wider Catchers (FBWC), which might be the first attempt to utilize sufficiently wide horizontal shallow branches without vertical deepening for guiding the fine granularity segmentation boundary through primary glass semantic information. Specifically, we designed the Wider Coarse-Catchers (WCC) for anchoring large area segmentation and reducing excessive extraction from a structural perspective. We embed fine-grained features by Cross Transpose Attention (CTA), which is introduced to avoid the incomplete area within the boundary caused by reflection noise. For excavating glass features and balancing high-low layers context, a learnable Fourier Convolution Controller (FCC) is proposed to regulate information integration robustly. The proposed method has been validated on three different public glass segmentation datasets. Experimental results reveal that the proposed method yields better segmentation performance compared with the state-of-the-art (SOTA) methods in glass image segmentation.
Snapshot Reinforcement Learning: Leveraging Prior Trajectories for Efficiency
Mar 12, 2024



Deep reinforcement learning (DRL) algorithms require substantial samples and computational resources to achieve higher performance, which restricts their practical application and poses challenges for further development. Given the constraint of limited resources, it is essential to leverage existing computational work (e.g., learned policies, samples) to enhance sample efficiency and reduce the computational resource consumption of DRL algorithms. Previous works to leverage existing computational work require intrusive modifications to existing algorithms and models, designed specifically for specific algorithms, lacking flexibility and universality. In this paper, we present the Snapshot Reinforcement Learning (SnapshotRL) framework, which enhances sample efficiency by simply altering environments, without making any modifications to algorithms and models. By allowing student agents to choose states in teacher trajectories as the initial state to sample, SnapshotRL can effectively utilize teacher trajectories to assist student agents in training, allowing student agents to explore a larger state space at the early training phase. We propose a simple and effective SnapshotRL baseline algorithm, S3RL, which integrates well with existing DRL algorithms. Our experiments demonstrate that integrating S3RL with TD3, SAC, and PPO algorithms on the MuJoCo benchmark significantly improves sample efficiency and average return, without extra samples and additional computational resources.
AVM-SLAM: Semantic Visual SLAM with Multi-Sensor Fusion in a Bird's Eye View for Automated Valet Parking
Sep 15, 2023Automated Valet Parking (AVP) requires precise localization in challenging garage conditions, including poor lighting, sparse textures, repetitive structures, dynamic scenes, and the absence of Global Positioning System (GPS) signals, which often pose problems for conventional localization methods. To address these adversities, we present AVM-SLAM, a semantic visual SLAM framework with multi-sensor fusion in a Bird's Eye View (BEV). Our framework integrates four fisheye cameras, four wheel encoders, and an Inertial Measurement Unit (IMU). The fisheye cameras form an Around View Monitor (AVM) subsystem, generating BEV images. Convolutional Neural Networks (CNNs) extract semantic features from these images, aiding in mapping and localization tasks. These semantic features provide long-term stability and perspective invariance, effectively mitigating environmental challenges. Additionally, data fusion from wheel encoders and IMU enhances system robustness by improving motion estimation and reducing drift. To validate AVM-SLAM's efficacy and robustness, we provide a large-scale, high-resolution underground garage dataset, available at https://github.com/yale-cv/avm-slam. This dataset enables researchers to further explore and assess AVM-SLAM in similar environments.