 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Merit or Linguistic Crutch? A Close Look at DeepSeek-OCR
Jan 08, 2026DeepSeek-OCR utilizes an optical 2D mapping approach to achieve high-ratio vision-text compression, claiming to decode text tokens exceeding ten times the input visual tokens. While this suggests a promising solution for the LLM long-context bottleneck, we investigate a critical question: "Visual merit or linguistic crutch - which drives DeepSeek-OCR's performance?" By employing sentence-level and word-level semantic corruption, we isolate the model's intrinsic OCR capabilities from its language priors. Results demonstrate that without linguistic support, DeepSeek-OCR's performance plummets from approximately 90% to 20%. Comparative benchmarking against 13 baseline models reveals that traditional pipeline OCR methods exhibit significantly higher robustness to such semantic perturbations than end-to-end methods. Furthermore, we find that lower visual token counts correlate with increased reliance on priors, exacerbating hallucination risks. Context stress testing also reveals a total model collapse around 10,000 text tokens, suggesting that current optical compression techniques may paradoxically aggravate the long-context bottleneck. This study empirically defines DeepSeek-OCR's capability boundaries and offers essential insights for future optimizations of the vision-text compression paradigm. We release all data, results and scripts used in this study at https://github.com/dududuck00/DeepSeekOCR.
GUITester: Enabling GUI Agents for Exploratory Defect Discovery
Jan 08, 2026Exploratory GUI testing is essential for software quality but suffers from high manual costs. While Multi-modal Large Language Model (MLLM) agents excel in navigation, they fail to autonomously discover defects due to two core challenges: \textit{Goal-Oriented Masking}, where agents prioritize task completion over reporting anomalies, and \textit{Execution-Bias Attribution}, where system defects are misidentified as agent errors. To address these, we first introduce \textbf{GUITestBench}, the first interactive benchmark for this task, featuring 143 tasks across 26 defects. We then propose \textbf{GUITester}, a multi-agent framework that decouples navigation from verification via two modules: (i) a \textit{Planning-Execution Module (PEM)} that proactively probes for defects via embedded testing intents, and (ii) a \textit{Hierarchical Reflection Module (HRM)} that resolves attribution ambiguity through interaction history analysis. GUITester achieves an F1-score of 48.90\% (Pass@3) on GUITestBench, outperforming state-of-the-art baselines (33.35\%). Our work demonstrates the feasibility of autonomous exploratory testing and provides a robust foundation for future GUI quality assurance~\footnote{Our code is now available in~\href{https://github.com/ADaM-BJTU/GUITestBench}{https://github.com/ADaM-BJTU/GUITestBench}}.
Focus on What Matters: Fisher-Guided Adaptive Multimodal Fusion for Vulnerability Detection
Jan 05, 2026Software vulnerability detection is a critical task for securing software systems and can be formulated as a binary classification problem: given a code snippet, determine whether it contains a vulnerability. Existing multimodal approaches typically fuse Natural Code Sequence (NCS) representations from pretrained language models with Code Property Graph (CPG) representations from graph neural networks, often under the implicit assumption that adding a modality necessarily yields extra information. In practice, sequence and graph representations can be redundant, and fluctuations in the quality of the graph modality can dilute the discriminative signal of the dominant modality. To address this, we propose TaCCS-DFA, a framework that introduces Fisher information as a geometric measure of how sensitive feature directions are to the classification decision, enabling task-oriented complementary fusion. TaCCS-DFA online estimates a low-rank principal Fisher subspace and restricts cross-modal attention to task-sensitive directions, thereby retrieving structural features from CPG that complement the sequence modality; meanwhile, an adaptive gating mechanism dynamically adjusts the contribution of the graph modality for each sample to suppress noise propagation. Our analysis shows that, under an isotropic perturbation assumption, the proposed mechanism admits a tighter risk bound than conventional full-spectrum attention. Experiments on BigVul, Devign, and ReVeal show that TaCCS-DFA achieves strong performance across multiple backbones. With CodeT5 as the backbone, TaCCS-DFA reaches an F1 score of 87.80\% on the highly imbalanced BigVul dataset, improving over a strong baseline Vul-LMGNNs by 6.3 percentage points while maintaining low calibration error and computational overhead.
FingerSplat: Contactless Fingerprint 3D Reconstruction and Generation based on 3D Gaussian Splatting
Sep 19, 2025Researchers have conducted many pioneer researches on contactless fingerprints, yet the performance of contactless fingerprint recognition still lags behind contact-based methods primary due to the insufficient contactless fingerprint data with pose variations and lack of the usage of implicit 3D fingerprint representations. In this paper, we introduce a novel contactless fingerprint 3D registration, reconstruction and generation framework by integrating 3D Gaussian Splatting, with the goal of offering a new paradigm for contactless fingerprint recognition that integrates 3D fingerprint reconstruction and generation. To our knowledge, this is the first work to apply 3D Gaussian Splatting to the field of fingerprint recognition, and the first to achieve effective 3D registration and complete reconstruction of contactless fingerprints with sparse input images and without requiring camera parameters information. Experiments on 3D fingerprint registration, reconstruction, and generation prove that our method can accurately align and reconstruct 3D fingerprints from 2D images, and sequentially generates high-quality contactless fingerprints from 3D model, thus increasing the performances for contactless fingerprint recognition.
A Transformer-based Multimodal Fusion Model for Efficient Crowd Counting Using Visual and Wireless Signals
Apr 28, 2025Current crowd-counting models often rely on single-modal inputs, such as visual images or wireless signal data, which can result in significant information loss and suboptimal recognition performance. To address these shortcomings, we propose TransFusion, a novel multimodal fusion-based crowd-counting model that integrates Channel State Information (CSI) with image data. By leveraging the powerful capabilities of Transformer networks, TransFusion effectively combines these two distinct data modalities, enabling the capture of comprehensive global contextual information that is critical for accurate crowd estimation. However, while transformers are well capable of capturing global features, they potentially fail to identify finer-grained, local details essential for precise crowd counting. To mitigate this, we incorporate Convolutional Neural Networks (CNNs) into the model architecture, enhancing its ability to extract detailed local features that complement the global context provided by the Transformer. Extensive experimental evaluations demonstrate that TransFusion achieves high accuracy with minimal counting errors while maintaining superior efficiency.
ProFi-Net: Prototype-based Feature Attention with Curriculum Augmentation for WiFi-based Gesture Recognition
Apr 28, 2025This paper presents ProFi-Net, a novel few-shot learning framework for WiFi-based gesture recognition that overcomes the challenges of limited training data and sparse feature representations. ProFi-Net employs a prototype-based metric learning architecture enhanced with a feature-level attention mechanism, which dynamically refines the Euclidean distance by emphasizing the most discriminative feature dimensions. Additionally, our approach introduces a curriculum-inspired data augmentation strategy exclusively on the query set. By progressively incorporating Gaussian noise of increasing magnitude, the model is exposed to a broader range of challenging variations, thereby improving its generalization and robustness to overfitting. Extensive experiments conducted across diverse real-world environments demonstrate that ProFi-Net significantly outperforms conventional prototype networks and other state-of-the-art few-shot learning methods in terms of classification accuracy and training efficiency.
Boosting Self-Efficacy and Performance of Large Language Models via Verbal Efficacy Stimulations
Feb 10, 2025Significant improvements have been observed in the zero-shot capabilities of the Large Language Models (LLMs). Due to their high sensitivity to input, research has increasingly focused on enhancing LLMs' performance via direct and simple prompt engineering rather than intricate domain adaptation. Studies suggest that LLMs exhibit emotional intelligence, and both positive and negative emotions can potentially enhance task performances. However, prior interaction prompts have predominantly concentrated on a single stimulus type, neglecting to compare different stimulus effects, examine the influence of varying task difficulties, or explore underlying mechanisms. This paper, inspired by the positive correlation between self-efficacy and task performance within the social cognitive theory, introduces Verbal Efficacy Stimulations (VES). Our VES comprises three types of verbal prompts: encouraging, provocative, and critical, addressing six aspects such as helpfulness and competence. And we further categorize task difficulty, aiming to extensively investigate how distinct VES influence the self-efficacy and task achievements of language models at varied levels of difficulty. The experimental results show that the three types of VES improve the performance of LLMs on most tasks, and the most effective VES varies for different models. In extensive experiments, we have obtained some findings consistent with psychological theories, providing novel insights for future research.
Contactless Fingerprint Recognition Using 3D Graph Matching
Sep 13, 2024Contactless fingerprint is a newly developed type of fingerprint, and has gained lots of attention in recent fingerprint studies. However, most existing contactless fingerprint algorithms treat contactless fingerprints as 2D plain fingerprints, and utilize similar recognition methods as traditional contact-based 2D fingerprints. This recognition approach does not consider the modality difference between contactless and contact fingerprints, especially the intrinsic 3D characteristic of contactless fingerprints. This paper proposes a novel contactless fingerprint recognition algorithm that captures the revealed 3D feature of contactless fingerprints rather than the plain 2D feature. The proposed method first recovers 3D features from the input contactless fingerprint, including the 3D shape model and 3D fingerprint feature (minutiae, orientation, etc.). Then, a novel 3D graph matching is conducted in 3D space according to the extracted 3D feature. Our method captures the real 3D nature of contactless fingerprints as the whole feature extraction and matching algorithms are completed in real 3D space. Experiments results on contactless fingerprint databases show that the proposed method successfully improves the matching accuracy of contactless fingerprints. Exceptionally, our method performs stably across multiple poses of contactless fingerprints due to 3D graph matching, which is a great advantage compared to previous contactless fingerprint recognition algorithms.
Securing FC-RIS and UAV Empowered Multiuser Communications Against a Randomly Flying Eavesdropper
Aug 26, 2024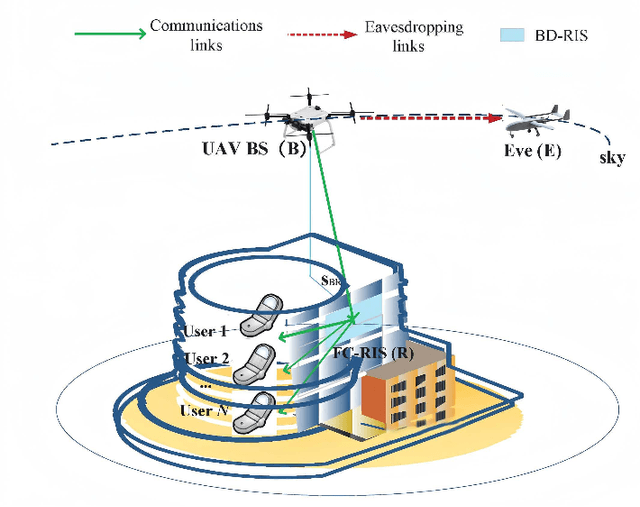

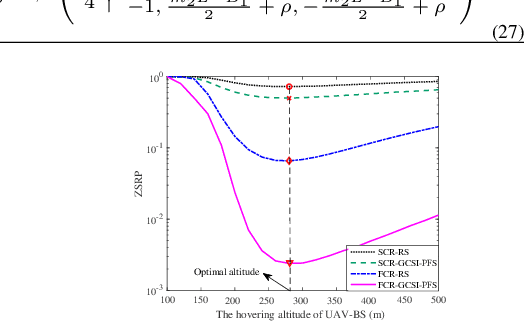
This paper investigates a wireless network consisting of an unmanned aerial vehicle (UAV) base station (BS), a fully-connected reconfigurable intelligent surface (FC-RIS), and multiple users, where the downlink signal can simultaneously be captured by an aerial eavesdropper at a random location. To improve the physical-layer security (PLS) of the considered downlink multiuser communications, we propose the fully-connected reconfigurable intelligent surface aided round-robin scheduling (FCR-RS) and the FC-RIS and ground channel state information (CSI) aided proportional fair scheduling (FCR-GCSI-PFS) schemes. Thereafter, we derive closed-form expressions of the zero secrecy rate probability (ZSRP). Numerical results not only validate the closed-form ZSRP analysis, but also verify that the proposed GCSI-PFS scheme obtains the same performance gain as the full-CSI-aided PFS in FC-RIS-aided communications. Furthermore, optimizing the hovering altitude remarkably enhances the PLS of the FC-RIS and UAV empowered multiuser communications.
MLS-Track: Multilevel Semantic Interaction in RMOT
Apr 18, 2024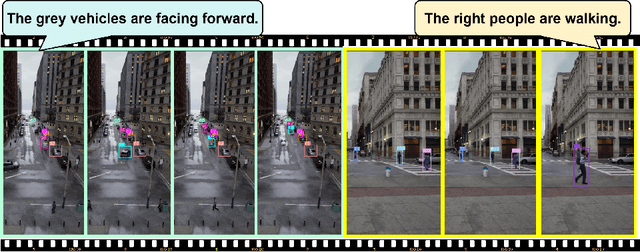
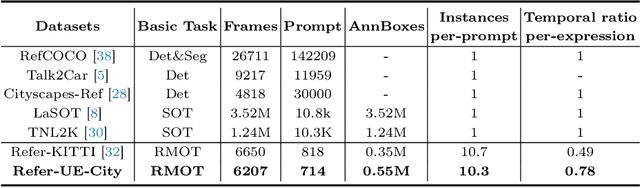
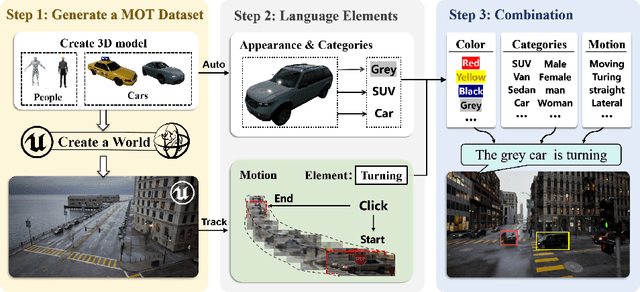
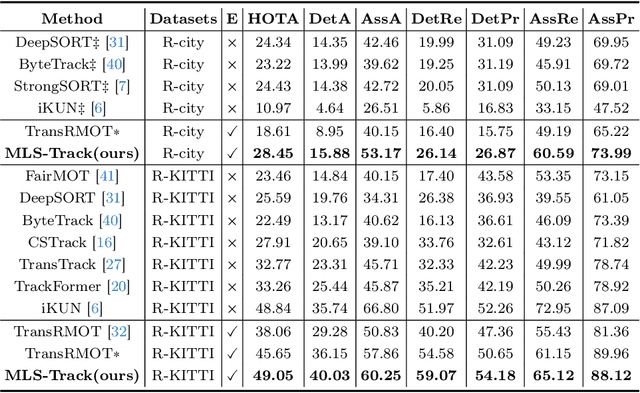
The new trend in multi-object tracking task is to track objects of interest using natural language. However, the scarcity of paired prompt-instance data hinders its progress. To address this challenge, we propose a high-quality yet low-cost data generation method base on Unreal Engine 5 and construct a brand-new benchmark dataset, named Refer-UE-City, which primarily includes scenes from intersection surveillance videos, detailing the appearance and actions of people and vehicles. Specifically, it provides 14 videos with a total of 714 expressions, and is comparable in scale to the Refer-KITTI dataset. Additionally, we propose a multi-level semantic-guided multi-object framework called MLS-Track, where the interaction between the model and text is enhanced layer by layer through the introduction of Semantic Guidance Module (SGM) and Semantic Correlation Branch (SCB). Extensive experiments on Refer-UE-City and Refer-KITTI datasets demonstrate the effectiveness of our proposed framework and it achieves state-of-the-art performance. Code and datatsets will be available.