 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Orientation and Weight Optimization for Robust Watertight Surface Reconstruction via Dirichlet-Regularized Winding Fields
Feb 14, 2026We propose Dirichlet Winding Reconstruction (DiWR), a robust method for reconstructing watertight surfaces from unoriented point clouds with non-uniform sampling, noise, and outliers. Our method uses the generalized winding number (GWN) field as the target implicit representation and jointly optimizes point orientations, per-point area weights, and confidence coefficients in a single pipeline. The optimization minimizes the Dirichlet energy of the induced winding field together with additional GWN-based constraints, allowing DiWR to compensate for non-uniform sampling, reduce the impact of noise, and downweight outliers during reconstruction, with no reliance on separate preprocessing. We evaluate DiWR on point clouds from 3D Gaussian Splatting, a computer-vision pipeline, and corrupted graphics benchmarks. Experiments show that DiWR produces plausible watertight surfaces on these challenging inputs and outperforms both traditional multi-stage pipelines and recent joint orientation-reconstruction methods.
Recovering 3D Shapes from Ultra-Fast Motion-Blurred Images
Feb 08, 2026We consider the problem of 3D shape recovery from ultra-fast motion-blurred images. While 3D reconstruction from static images has been extensively studied, recovering geometry from extreme motion-blurred images remains challenging. Such scenarios frequently occur in both natural and industrial settings, such as fast-moving objects in sports (e.g., balls) or rotating machinery, where rapid motion distorts object appearance and makes traditional 3D reconstruction techniques like Multi-View Stereo (MVS) ineffective. In this paper, we propose a novel inverse rendering approach for shape recovery from ultra-fast motion-blurred images. While conventional rendering techniques typically synthesize blur by averaging across multiple frames, we identify a major computational bottleneck in the repeated computation of barycentric weights. To address this, we propose a fast barycentric coordinate solver, which significantly reduces computational overhead and achieves a speedup of up to 4.57x, enabling efficient and photorealistic simulation of high-speed motion. Crucially, our method is fully differentiable, allowing gradients to propagate from rendered images to the underlying 3D shape, thereby facilitating shape recovery through inverse rendering. We validate our approach on two representative motion types: rapid translation and rotation. Experimental results demonstrate that our method enables efficient and realistic modeling of ultra-fast moving objects in the forward simulation. Moreover, it successfully recovers 3D shapes from 2D imagery of objects undergoing extreme translational and rotational motion, advancing the boundaries of vision-based 3D reconstruction. Project page: https://maxmilite.github.io/rec-from-ultrafast-blur/
Voronoi-Assisted Diffusion for Computing Unsigned Distance Fields from Unoriented Points
Oct 14, 2025Unsigned Distance Fields (UDFs) provide a flexible representation for 3D shapes with arbitrary topology, including open and closed surfaces, orientable and non-orientable geometries, and non-manifold structures. While recent neural approaches have shown promise in learning UDFs, they often suffer from numerical instability, high computational cost, and limited controllability. We present a lightweight, network-free method, Voronoi-Assisted Diffusion (VAD), for computing UDFs directly from unoriented point clouds. Our approach begins by assigning bi-directional normals to input points, guided by two Voronoi-based geometric criteria encoded in an energy function for optimal alignment. The aligned normals are then diffused to form an approximate UDF gradient field, which is subsequently integrated to recover the final UDF. Experiments demonstrate that VAD robustly handles watertight and open surfaces, as well as complex non-manifold and non-orientable geometries, while remaining computationally efficient and stable.
NeuVAS: Neural Implicit Surfaces for Variational Shape Modeling
Jun 16, 2025Neural implicit shape representation has drawn significant attention in recent years due to its smoothness, differentiability, and topological flexibility. However, directly modeling the shape of a neural implicit surface, especially as the zero-level set of a neural signed distance function (SDF), with sparse geometric control is still a challenging task. Sparse input shape control typically includes 3D curve networks or, more generally, 3D curve sketches, which are unstructured and cannot be connected to form a curve network, and therefore more difficult to deal with. While 3D curve networks or curve sketches provide intuitive shape control, their sparsity and varied topology pose challenges in generating high-quality surfaces to meet such curve constraints. In this paper, we propose NeuVAS, a variational approach to shape modeling using neural implicit surfaces constrained under sparse input shape control, including unstructured 3D curve sketches as well as connected 3D curve networks. Specifically, we introduce a smoothness term based on a functional of surface curvatures to minimize shape variation of the zero-level set surface of a neural SDF. We also develop a new technique to faithfully model G0 sharp feature curves as specified in the input curve sketches. Comprehensive comparisons with the state-of-the-art methods demonstrate the significant advantages of our method.
InfoGNN: End-to-end deep learning on mesh via graph neural networks
Mar 04, 2025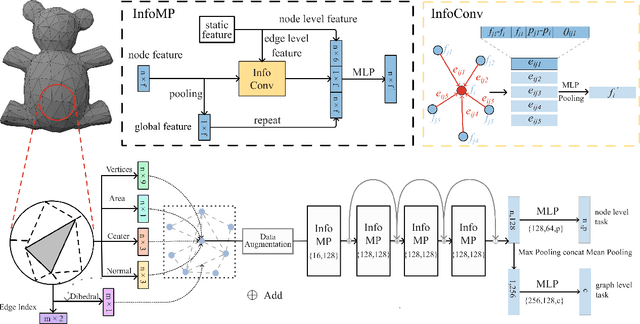


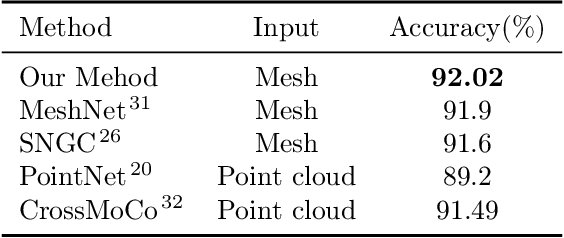
3D models are widely used in various industries, and mesh data has become an indispensable part of 3D modeling because of its unique advantages. Mesh data can provide an intuitive and practical expression of rich 3D information. However, its disordered, irregular data structure and complex surface information make it challenging to apply with deep learning models directly. Traditional mesh data processing methods often rely on mesh models with many limitations, such as manifold, which restrict their application scopes in reality and do not fully utilize the advantages of mesh models. This paper proposes a novel end-to-end framework for addressing the challenges associated with deep learning in mesh models centered around graph neural networks (GNN) and is titled InfoGNN. InfoGNN treats the mesh model as a graph, which enables it to handle irregular mesh data efficiently. Moreover, we propose InfoConv and InfoMP modules, which utilize the position information of the points and fully use the static information such as face normals, dihedral angles, and dynamic global feature information to fully use all kinds of data. In addition, InfoGNN is an end-to-end framework, and we simplify the network design to make it more efficient, paving the way for efficient deep learning of complex 3D models. We conducted experiments on several publicly available datasets, and the results show that InfoGNN achieves excellent performance in mesh classification and segmentation tasks.
SuperGaussians: Enhancing Gaussian Splatting Using Primitives with Spatially Varying Colors
Nov 28, 2024



Gaussian Splattings demonstrate impressive results in multi-view reconstruction based on Gaussian explicit representations. However, the current Gaussian primitives only have a single view-dependent color and an opacity to represent the appearance and geometry of the scene, resulting in a non-compact representation. In this paper, we introduce a new method called SuperGaussians that utilizes spatially varying colors and opacity in a single Gaussian primitive to improve its representation ability. We have implemented bilinear interpolation, movable kernels, and even tiny neural networks as spatially varying functions. Quantitative and qualitative experimental results demonstrate that all three functions outperform the baseline, with the best movable kernels achieving superior novel view synthesis performance on multiple datasets, highlighting the strong potential of spatially varying functions.
NASM: Neural Anisotropic Surface Meshing
Oct 30, 2024This paper introduces a new learning-based method, NASM, for anisotropic surface meshing. Our key idea is to propose a graph neural network to embed an input mesh into a high-dimensional (high-d) Euclidean embedding space to preserve curvature-based anisotropic metric by using a dot product loss between high-d edge vectors. This can dramatically reduce the computational time and increase the scalability. Then, we propose a novel feature-sensitive remeshing on the generated high-d embedding to automatically capture sharp geometric features. We define a high-d normal metric, and then derive an automatic differentiation on a high-d centroidal Voronoi tessellation (CVT) optimization with the normal metric to simultaneously preserve geometric features and curvature anisotropy that exhibit in the original 3D shapes. To our knowledge, this is the first time that a deep learning framework and a large dataset are proposed to construct a high-d Euclidean embedding space for 3D anisotropic surface meshing. Experimental results are evaluated and compared with the state-of-the-art in anisotropic surface meshing on a large number of surface models from Thingi10K dataset as well as tested on extensive unseen 3D shapes from Multi-Garment Network dataset and FAUST human dataset.
Quasi-Medial Distance Field (Q-MDF): A Robust Method for Approximating and Discretizing Neural Medial Axis
Oct 23, 2024The medial axis, a lower-dimensional shape descriptor, plays an important role in the field of digital geometry processing. Despite its importance, robust computation of the medial axis transform from diverse inputs, especially point clouds with defects, remains a significant challenge. In this paper, we tackle the challenge by proposing a new implicit method that diverges from mainstream explicit medial axis computation techniques. Our key technical insight is the difference between the signed distance field (SDF) and the medial field (MF) of a solid shape is the unsigned distance field (UDF) of the shape's medial axis. This allows for formulating medial axis computation as an implicit reconstruction problem. Utilizing a modified double covering method, we extract the medial axis as the zero level-set of the UDF. Extensive experiments show that our method has enhanced accuracy and robustness in learning compact medial axis transform from thorny meshes and point clouds compared to existing methods.
Correspondence-Free Non-Rigid Point Set Registration Using Unsupervised Clustering Analysis
Jun 27, 2024This paper presents a novel non-rigid point set registration method that is inspired by unsupervised clustering analysis. Unlike previous approaches that treat the source and target point sets as separate entities, we develop a holistic framework where they are formulated as clustering centroids and clustering members, separately. We then adopt Tikhonov regularization with an $\ell_1$-induced Laplacian kernel instead of the commonly used Gaussian kernel to ensure smooth and more robust displacement fields. Our formulation delivers closed-form solutions, theoretical guarantees, independence from dimensions, and the ability to handle large deformations. Subsequently, we introduce a clustering-improved Nystr\"om method to effectively reduce the computational complexity and storage of the Gram matrix to linear, while providing a rigorous bound for the low-rank approximation. Our method achieves high accuracy results across various scenarios and surpasses competitors by a significant margin, particularly on shapes with substantial deformations. Additionally, we demonstrate the versatility of our method in challenging tasks such as shape transfer and medical registration.
Deep-PE: A Learning-Based Pose Evaluator for Point Cloud Registration
May 25, 2024



In the realm of point cloud registration, the most prevalent pose evaluation approaches are statistics-based, identifying the optimal transformation by maximizing the number of consistent correspondences. However, registration recall decreases significantly when point clouds exhibit a low overlap rate, despite efforts in designing feature descriptors and establishing correspondences. In this paper, we introduce Deep-PE, a lightweight, learning-based pose evaluator designed to enhance the accuracy of pose selection, especially in challenging point cloud scenarios with low overlap. Our network incorporates a Pose-Aware Attention (PAA) module to simulate and learn the alignment status of point clouds under various candidate poses, alongside a Pose Confidence Prediction (PCP) module that predicts the likelihood of successful registration. These two modules facilitate the learning of both local and global alignment priors. Extensive tests across multiple benchmarks confirm the effectiveness of Deep-PE. Notably, on 3DLoMatch with a low overlap rate, Deep-PE significantly outperforms state-of-the-art methods by at least 8% and 11% in registration recall under handcrafted FPFH and learning-based FCGF descriptors, respectively. To the best of our knowledge, this is the first study to utilize deep learning to select the optimal pose without the explicit need for input correspondences.