 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussiAnimate: Reconstruct and Rig Animatable Categories with Level of Dynamics
Apr 09, 2026Free-form bones, that conform closely to the surface, can effectively capture non-rigid deformations, but lack a kinematic structure necessary for intuitive control. Thus, we propose a Scaffold-Skin Rigging System, termed "Skelebones", with three key steps: (1) Bones: compress temporally-consistent deformable Gaussians into free-form bones, approximating non-rigid surface deformations; (2) Skeleton: extract a Mean Curvature Skeleton from canonical Gaussians and refine it temporally, ensuring a category-agnostic, motion-adaptive, and topology-correct kinematic structure; (3) Binding: bind the skeleton and bones via non-parametric partwise motion matching (PartMM), synthesizing novel bone motions by matching, retrieving, and blending existing ones. Collectively, these three steps enable us to compress the Level of Dynamics of 4D shapes into compact skelebones that are both controllable and expressive. We validate our approach on both synthetic and real-world datasets, achieving significant improvements in reanimation performance across unseen poses-with 17.3% PSNR gains over Linear Blend Skinning (LBS) and 21.7% over Bag-of-Bones (BoB)-while maintaining excellent reconstruction fidelity, particularly for characters exhibiting complex non-rigid surface dynamics. Our Partwise Motion Matching algorithm demonstrates strong generalization to both Gaussian and mesh representations, especially under low-data regime (~1000 frames), achieving 48.4% RMSE improvement over robust LBS and outperforming GRU- and MLP-based learning methods by >20%. Code will be made publicly available for research purposes at cookmaker.cn/gaussianimate.
UniRecGen: Unifying Multi-View 3D Reconstruction and Generation
Apr 01, 2026Sparse-view 3D modeling represents a fundamental tension between reconstruction fidelity and generative plausibility. While feed-forward reconstruction excels in efficiency and input alignment, it often lacks the global priors needed for structural completeness. Conversely, diffusion-based generation provides rich geometric details but struggles with multi-view consistency. We present UniRecGen, a unified framework that integrates these two paradigms into a single cooperative system. To overcome inherent conflicts in coordinate spaces, 3D representations, and training objectives, we align both models within a shared canonical space. We employ disentangled cooperative learning, which maintains stable training while enabling seamless collaboration during inference. Specifically, the reconstruction module is adapted to provide canonical geometric anchors, while the diffusion generator leverages latent-augmented conditioning to refine and complete the geometric structure. Experimental results demonstrate that UniRecGen achieves superior fidelity and robustness, outperforming existing methods in creating complete and consistent 3D models from sparse observations.
HGGT: Robust and Flexible 3D Hand Mesh Reconstruction from Uncalibrated Images
Mar 25, 2026Recovering high-fidelity 3D hand geometry from images is a critical task in computer vision, holding significant value for domains such as robotics, animation and VR/AR. Crucially, scalable applications demand both accuracy and deployment flexibility, requiring the ability to leverage massive amounts of unstructured image data from the internet or enable deployment on consumer-grade RGB cameras without complex calibration. However, current methods face a dilemma. While single-view approaches are easy to deploy, they suffer from depth ambiguity and occlusion. Conversely, multi-view systems resolve these uncertainties but typically demand fixed, calibrated setups, limiting their real-world utility. To bridge this gap, we draw inspiration from 3D foundation models that learn explicit geometry directly from visual data. By reformulating hand reconstruction from arbitrary views as a visual-geometry grounded task, we propose a feed-forward architecture that, for the first time in literature, jointly infers 3D hand meshes and camera poses from uncalibrated views. Extensive evaluations show that our approach outperforms state-of-the-art benchmarks and demonstrates strong generalization to uncalibrated, in-the-wild scenarios. Here is the link of our project page: https://lym29.github.io/HGGT/.
FlexAM: Flexible Appearance-Motion Decomposition for Versatile Video Generation Control
Feb 13, 2026Effective and generalizable control in video generation remains a significant challenge. While many methods rely on ambiguous or task-specific signals, we argue that a fundamental disentanglement of "appearance" and "motion" provides a more robust and scalable pathway. We propose FlexAM, a unified framework built upon a novel 3D control signal. This signal represents video dynamics as a point cloud, introducing three key enhancements: multi-frequency positional encoding to distinguish fine-grained motion, depth-aware positional encoding, and a flexible control signal for balancing precision and generative quality. This representation allows FlexAM to effectively disentangle appearance and motion, enabling a wide range of tasks including I2V/V2V editing, camera control, and spatial object editing. Extensive experiments demonstrate that FlexAM achieves superior performance across all evaluated tasks.
RefAny3D: 3D Asset-Referenced Diffusion Models for Image Generation
Jan 29, 2026In this paper, we propose a 3D asset-referenced diffusion model for image generation, exploring how to integrate 3D assets into image diffusion models. Existing reference-based image generation methods leverage large-scale pretrained diffusion models and demonstrate strong capability in generating diverse images conditioned on a single reference image. However, these methods are limited to single-image references and cannot leverage 3D assets, constraining their practical versatility. To address this gap, we present a cross-domain diffusion model with dual-branch perception that leverages multi-view RGB images and point maps of 3D assets to jointly model their colors and canonical-space coordinates, achieving precise consistency between generated images and the 3D references. Our spatially aligned dual-branch generation architecture and domain-decoupled generation mechanism ensure the simultaneous generation of two spatially aligned but content-disentangled outputs, RGB images and point maps, linking 2D image attributes with 3D asset attributes. Experiments show that our approach effectively uses 3D assets as references to produce images consistent with the given assets, opening new possibilities for combining diffusion models with 3D content creation.
TrackingWorld: World-centric Monocular 3D Tracking of Almost All Pixels
Dec 09, 2025Monocular 3D tracking aims to capture the long-term motion of pixels in 3D space from a single monocular video and has witnessed rapid progress in recent years. However, we argue that the existing monocular 3D tracking methods still fall short in separating the camera motion from foreground dynamic motion and cannot densely track newly emerging dynamic subjects in the videos. To address these two limitations, we propose TrackingWorld, a novel pipeline for dense 3D tracking of almost all pixels within a world-centric 3D coordinate system. First, we introduce a tracking upsampler that efficiently lifts the arbitrary sparse 2D tracks into dense 2D tracks. Then, to generalize the current tracking methods to newly emerging objects, we apply the upsampler to all frames and reduce the redundancy of 2D tracks by eliminating the tracks in overlapped regions. Finally, we present an efficient optimization-based framework to back-project dense 2D tracks into world-centric 3D trajectories by estimating the camera poses and the 3D coordinates of these 2D tracks. Extensive evaluations on both synthetic and real-world datasets demonstrate that our system achieves accurate and dense 3D tracking in a world-centric coordinate frame.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025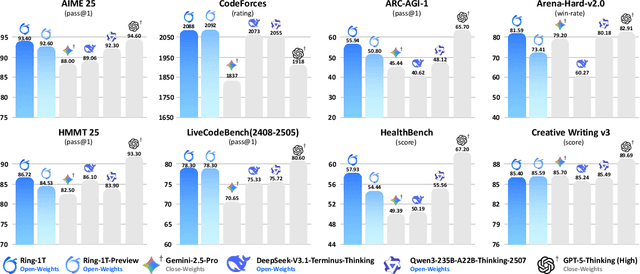
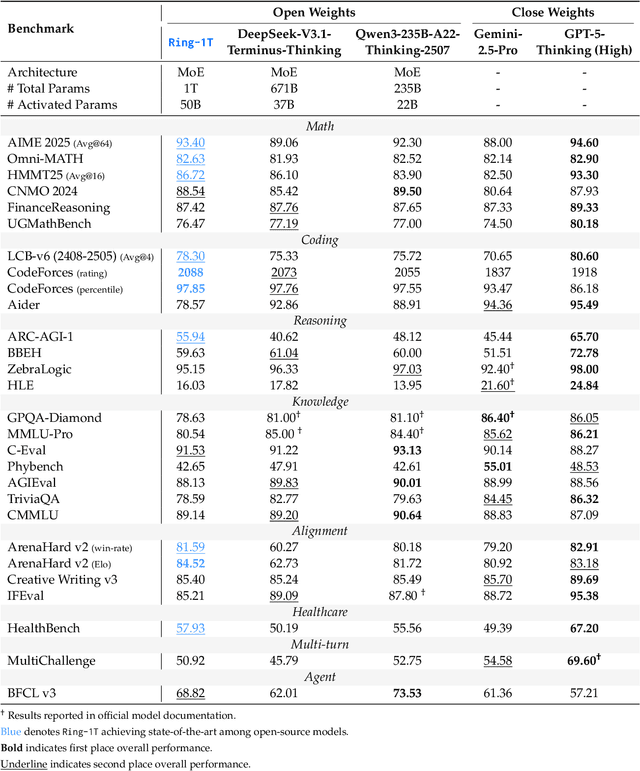
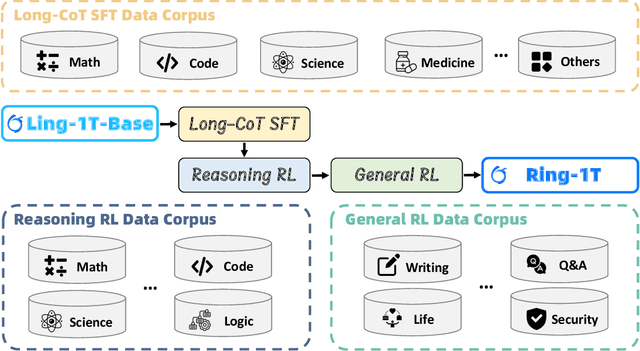
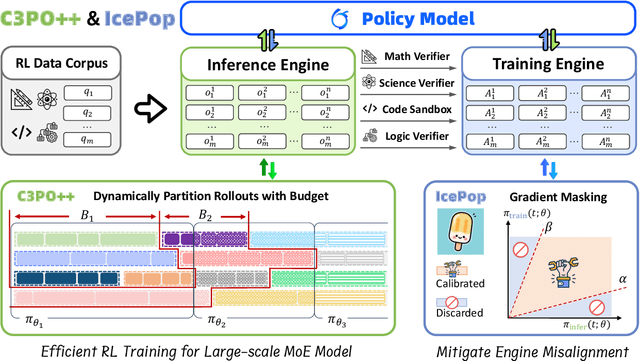
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
PartSAM: A Scalable Promptable Part Segmentation Model Trained on Native 3D Data
Sep 26, 2025Segmenting 3D objects into parts is a long-standing challenge in computer vision. To overcome taxonomy constraints and generalize to unseen 3D objects, recent works turn to open-world part segmentation. These approaches typically transfer supervision from 2D foundation models, such as SAM, by lifting multi-view masks into 3D. However, this indirect paradigm fails to capture intrinsic geometry, leading to surface-only understanding, uncontrolled decomposition, and limited generalization. We present PartSAM, the first promptable part segmentation model trained natively on large-scale 3D data. Following the design philosophy of SAM, PartSAM employs an encoder-decoder architecture in which a triplane-based dual-branch encoder produces spatially structured tokens for scalable part-aware representation learning. To enable large-scale supervision, we further introduce a model-in-the-loop annotation pipeline that curates over five million 3D shape-part pairs from online assets, providing diverse and fine-grained labels. This combination of scalable architecture and diverse 3D data yields emergent open-world capabilities: with a single prompt, PartSAM achieves highly accurate part identification, and in a Segment-Every-Part mode, it automatically decomposes shapes into both surface and internal structures. Extensive experiments show that PartSAM outperforms state-of-the-art methods by large margins across multiple benchmarks, marking a decisive step toward foundation models for 3D part understanding. Our code and model will be released soon.
MOSPA: Human Motion Generation Driven by Spatial Audio
Jul 16, 2025Enabling virtual humans to dynamically and realistically respond to diverse auditory stimuli remains a key challenge in character animation, demanding the integration of perceptual modeling and motion synthesis. Despite its significance, this task remains largely unexplored. Most previous works have primarily focused on mapping modalities like speech, audio, and music to generate human motion. As of yet, these models typically overlook the impact of spatial features encoded in spatial audio signals on human motion. To bridge this gap and enable high-quality modeling of human movements in response to spatial audio, we introduce the first comprehensive Spatial Audio-Driven Human Motion (SAM) dataset, which contains diverse and high-quality spatial audio and motion data. For benchmarking, we develop a simple yet effective diffusion-based generative framework for human MOtion generation driven by SPatial Audio, termed MOSPA, which faithfully captures the relationship between body motion and spatial audio through an effective fusion mechanism. Once trained, MOSPA could generate diverse realistic human motions conditioned on varying spatial audio inputs. We perform a thorough investigation of the proposed dataset and conduct extensive experiments for benchmarking, where our method achieves state-of-the-art performance on this task. Our model and dataset will be open-sourced upon acceptance. Please refer to our supplementary video for more details.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)