 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynergistic Redundancy: Towards Verifiable Safety for Autonomous Vehicles
Paper and Code
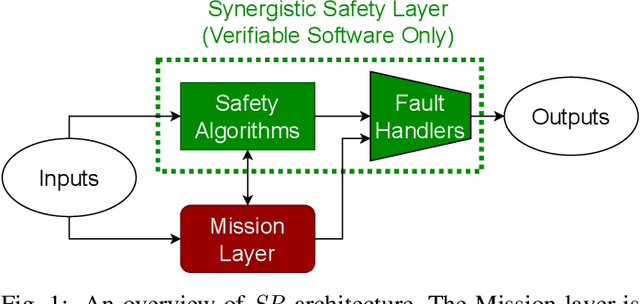
As Autonomous Vehicle (AV) development has progressed, concerns regarding the safety of passengers and agents in their environment have risen. Each real world traffic collision involving autonomously controlled vehicles has compounded this concern. Open source autonomous driving implementations show a software architecture with complex interdependent tasks, heavily reliant on machine learning and Deep Neural Networks (DNN), which are vulnerable to non deterministic faults and corner cases. These complex subsystems work together to fulfill the mission of the AV while also maintaining safety. Although significant improvements are being made towards increasing the empirical reliability and confidence in these systems, the inherent limitations of DNN verification create an, as yet, insurmountable challenge in providing deterministic safety guarantees in AV. We propose Synergistic Redundancy (SR), a safety architecture for complex cyber physical systems, like AV. SR provides verifiable safety guarantees against specific faults by decoupling the mission and safety tasks of the system. Simultaneous to independently fulfilling their primary roles, the partially functionally redundant mission and safety tasks are able to aid each other, synergistically improving the combined system. The synergistic safety layer uses only verifiable and logically analyzable software to fulfill its tasks. Close coordination with the mission layer allows easier and early detection of safety critical faults in the system. SR simplifies the mission layer's optimization goals and improves its design. SR provides safe deployment of high performance, although inherently unverifiable, machine learning software. In this work, we first present the design and features of the SR architecture and then evaluate the efficacy of the solution, focusing on the crucial problem of obstacle existence detection faults in AV.