 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerifiable Obstacle Detection
Paper and Code
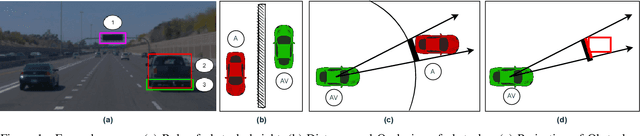
Perception of obstacles remains a critical safety concern for autonomous vehicles. Real-world collisions have shown that the autonomy faults leading to fatal collisions originate from obstacle existence detection. Open source autonomous driving implementations show a perception pipeline with complex interdependent Deep Neural Networks. These networks are not fully verifiable, making them unsuitable for safety-critical tasks. In this work, we present a safety verification of an existing LiDAR based classical obstacle detection algorithm. We establish strict bounds on the capabilities of this obstacle detection algorithm. Given safety standards, such bounds allow for determining LiDAR sensor properties that would reliably satisfy the standards. Such analysis has as yet been unattainable for neural network based perception systems. We provide a rigorous analysis of the obstacle detection system with empirical results based on real-world sensor data.