 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerated Almost-Sure Convergence Rates for Nonconvex Stochastic Gradient Descent using Stochastic Learning Rates
Nov 09, 2021

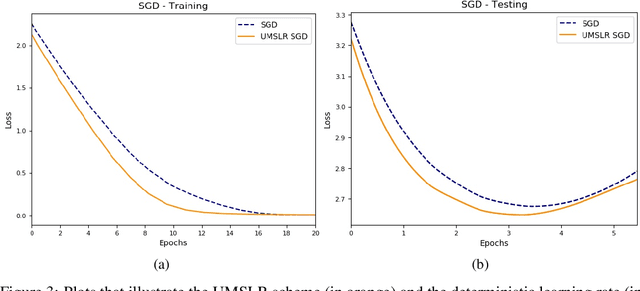
Large-scale optimization problems require algorithms both effective and efficient. One such popular and proven algorithm is Stochastic Gradient Descent which uses first-order gradient information to solve these problems. This paper studies almost-sure convergence rates of the Stochastic Gradient Descent method when instead of deterministic, its learning rate becomes stochastic. In particular, its learning rate is equipped with a multiplicative stochasticity, producing a stochastic learning rate scheme. Theoretical results show accelerated almost-sure convergence rates of Stochastic Gradient Descent in a nonconvex setting when using an appropriate stochastic learning rate, compared to a deterministic-learning-rate scheme. The theoretical results are verified empirically.
Stochastic Learning Rate Optimization in the Stochastic Approximation and Online Learning Settings
Oct 20, 2021



In this work, multiplicative stochasticity is applied to the learning rate of stochastic optimization algorithms, giving rise to stochastic learning-rate schemes. In-expectation theoretical convergence results of Stochastic Gradient Descent equipped with this novel stochastic learning rate scheme under the stochastic setting, as well as convergence results under the online optimization settings are provided. Empirical results consider the case of an adaptively uniformly distributed multiplicative stochasticity and include not only Stochastic Gradient Descent, but also other popular algorithms equipped with a stochastic learning rate. They demonstrate noticeable optimization performance gains, with respect to their deterministic-learning-rate versions.
Biologically Inspired Collision Avoidance Without Distance Information
Mar 23, 2021
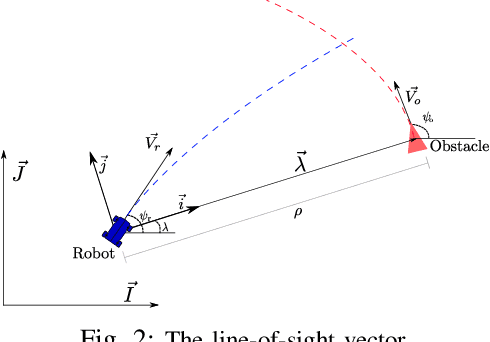
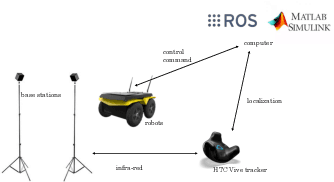
Biological evidence shows that animals are capable of evading eminent collision without using depth information, relying solely on looming stimuli. In robotics, collision avoidance among uncooperative vehicles requires measurement of relative distance to the obstacle. Small, low-cost mobile robots and UAVs might be unable to carry distance measuring sensors, like LIDARS and depth cameras. We propose a control framework suitable for a unicycle-like vehicle moving in a 2D plane that achieves collision avoidance. The control strategy is inspired by the reaction of invertebrates to approaching obstacles, relying exclusively on line-of-sight (LOS) angle, LOS angle rate, and time-to-collision as feedback. Those quantities can readily be estimated from a monocular camera vision system onboard a mobile robot. The proposed avoidance law commands the heading angle to circumvent a moving obstacle with unknown position, while the velocity controller is left as a degree of freedom to accomplish other mission objectives. Theoretical guarantees are provided to show that minimum separation between the vehicle and the obstacle is attained regardless of the exogenous tracking controller.