 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Dashcam Videos to Driving Simulations: Stress Testing Automated Vehicles against Rare Events
Nov 25, 2024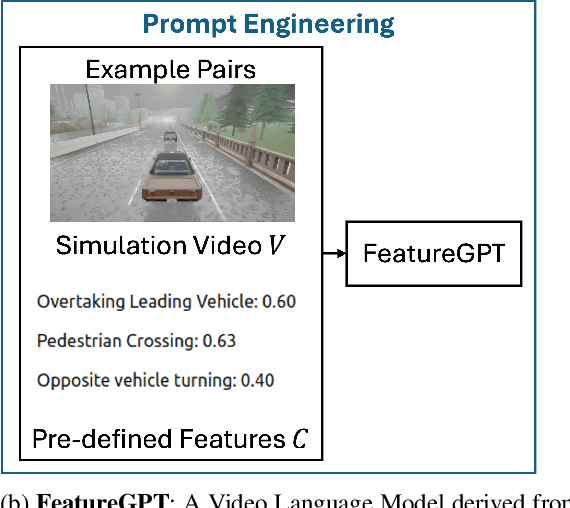
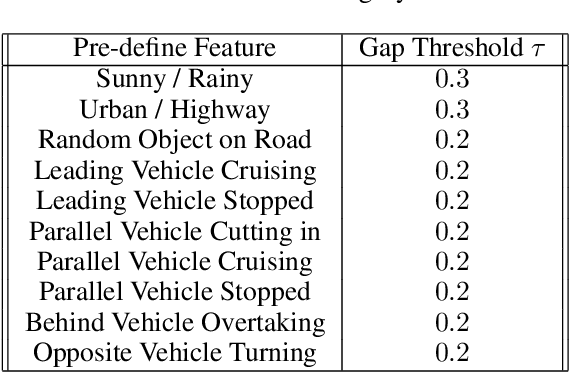

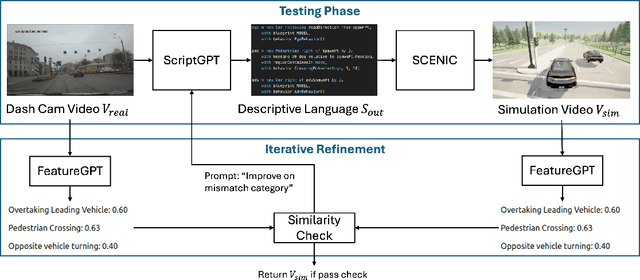
Testing Automated Driving Systems (ADS) in simulation with realistic driving scenarios is important for verifying their performance. However, converting real-world driving videos into simulation scenarios is a significant challenge due to the complexity of interpreting high-dimensional video data and the time-consuming nature of precise manual scenario reconstruction. In this work, we propose a novel framework that automates the conversion of real-world car crash videos into detailed simulation scenarios for ADS testing. Our approach leverages prompt-engineered Video Language Models(VLM) to transform dashcam footage into SCENIC scripts, which define the environment and driving behaviors in the CARLA simulator, enabling the generation of realistic simulation scenarios. Importantly, rather than solely aiming for one-to-one scenario reconstruction, our framework focuses on capturing the essential driving behaviors from the original video while offering flexibility in parameters such as weather or road conditions to facilitate search-based testing. Additionally, we introduce a similarity metric that helps iteratively refine the generated scenario through feedback by comparing key features of driving behaviors between the real and simulated videos. Our preliminary results demonstrate substantial time efficiency, finishing the real-to-sim conversion in minutes with full automation and no human intervention, while maintaining high fidelity to the original driving events.
Risk-aware MPPI for Stochastic Hybrid Systems
Nov 14, 2024



Path Planning for stochastic hybrid systems presents a unique challenge of predicting distributions of future states subject to a state-dependent dynamics switching function. In this work, we propose a variant of Model Predictive Path Integral Control (MPPI) to plan kinodynamic paths for such systems. Monte Carlo may be inaccurate when few samples are chosen to predict future states under state-dependent disturbances. We employ recently proposed Unscented Transform-based methods to capture stochasticity in the states as well as the state-dependent switching surfaces. This is in contrast to previous works that perform switching based only on the mean of predicted states. We focus our motion planning application on the navigation of a mobile robot in the presence of dynamically moving agents whose responses are based on sensor-constrained attention zones. We evaluate our framework on a simulated mobile robot and show faster convergence to a goal without collisions when the robot exploits the hybrid human dynamics versus when it does not.
Querying Perception Streams with Spatial Regular Expressions
Nov 08, 2024



Perception in fields like robotics, manufacturing, and data analysis generates large volumes of temporal and spatial data to effectively capture their environments. However, sorting through this data for specific scenarios is a meticulous and error-prone process, often dependent on the application, and lacks generality and reproducibility. In this work, we introduce SpREs as a novel querying language for pattern matching over perception streams containing spatial and temporal data derived from multi-modal dynamic environments. To highlight the capabilities of SpREs, we developed the STREM tool as both an offline and online pattern matching framework for perception data. We demonstrate the offline capabilities of STREM through a case study on a publicly available AV dataset (Woven Planet Perception) and its online capabilities through a case study integrating STREM in ROS with the CARLA simulator. We also conduct performance benchmark experiments on various SpRE queries. Using our matching framework, we are able to find over 20,000 matches within 296 ms making STREM applicable in runtime monitoring applications.
Model Predictive Path Integral Methods with Reach-Avoid Tasks and Control Barrier Functions
Jul 18, 2024



The rapid advancement of robotics necessitates robust tools for developing and testing safe control architectures in dynamic and uncertain environments. Ensuring safety and reliability in robotics, especially in safety-critical applications, is crucial, driving substantial industrial and academic efforts. In this context, we extend CBFkit, a Python/ROS2 toolbox, which now incorporates a planner using reach-avoid specifications as a cost function. This integration with the Model Predictive Path Integral (MPPI) controllers enables the toolbox to satisfy complex tasks while ensuring formal safety guarantees under various sources of uncertainty using Control Barrier Functions (CBFs). CBFkit is optimized for speed using JAX for automatic differentiation and jaxopt for quadratic program solving. The toolbox supports various robotic applications, including autonomous navigation, human-robot interaction, and multi-robot coordination. The toolbox also offers a comprehensive library of planner, controller, sensor, and estimator implementations. Through a series of examples, we demonstrate the enhanced capabilities of CBFkit in different robotic scenarios.
CBFKIT: A Control Barrier Function Toolbox for Robotics Applications
Apr 10, 2024This paper introduces CBFKit, a Python/ROS toolbox for safe robotics planning and control under uncertainty. The toolbox provides a general framework for designing control barrier functions for mobility systems within both deterministic and stochastic environments. It can be connected to the ROS open-source robotics middleware, allowing for the setup of multi-robot applications, encoding of environments and maps, and integrations with predictive motion planning algorithms. Additionally, it offers multiple CBF variations and algorithms for robot control. The CBFKit is demonstrated on the Toyota Human Support Robot (HSR) in both simulation and in physical experiments.
Scaling Learning based Policy Optimization for Temporal Tasks via Dropout
Mar 23, 2024



This paper introduces a model-based approach for training feedback controllers for an autonomous agent operating in a highly nonlinear environment. We desire the trained policy to ensure that the agent satisfies specific task objectives, expressed in discrete-time Signal Temporal Logic (DT-STL). One advantage for reformulation of a task via formal frameworks, like DT-STL, is that it permits quantitative satisfaction semantics. In other words, given a trajectory and a DT-STL formula, we can compute the robustness, which can be interpreted as an approximate signed distance between the trajectory and the set of trajectories satisfying the formula. We utilize feedback controllers, and we assume a feed forward neural network for learning these feedback controllers. We show how this learning problem is similar to training recurrent neural networks (RNNs), where the number of recurrent units is proportional to the temporal horizon of the agent's task objectives. This poses a challenge: RNNs are susceptible to vanishing and exploding gradients, and na\"{i}ve gradient descent-based strategies to solve long-horizon task objectives thus suffer from the same problems. To tackle this challenge, we introduce a novel gradient approximation algorithm based on the idea of dropout or gradient sampling. We show that, the existing smooth semantics for robustness are inefficient regarding gradient computation when the specification becomes complex. To address this challenge, we propose a new smooth semantics for DT-STL that under-approximates the robustness value and scales well for backpropagation over a complex specification. We show that our control synthesis methodology, can be quite helpful for stochastic gradient descent to converge with less numerical issues, enabling scalable backpropagation over long time horizons and trajectories over high dimensional state spaces.
Feasible Space Monitoring for Multiple Control Barrier Functions with application to Large Scale Indoor Navigation
Dec 12, 2023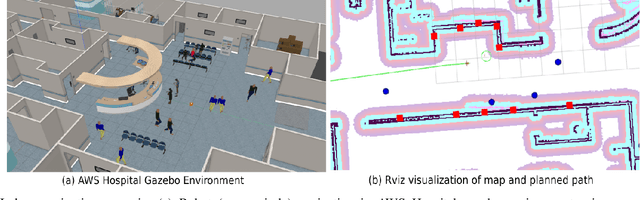
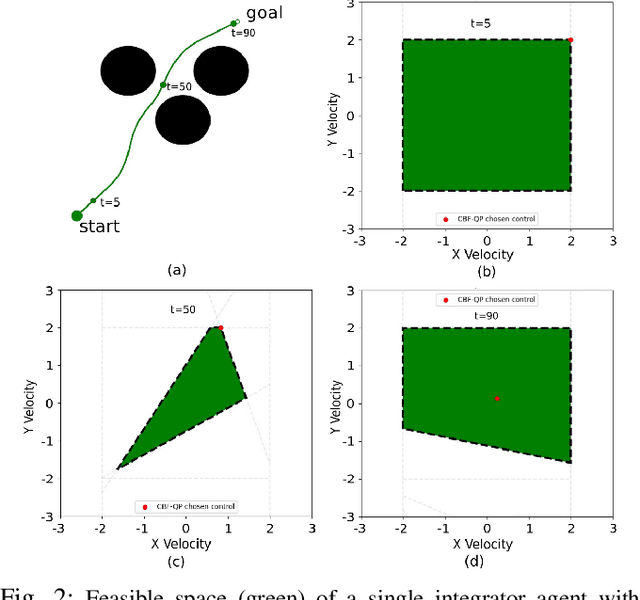
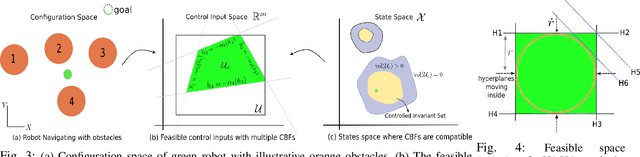
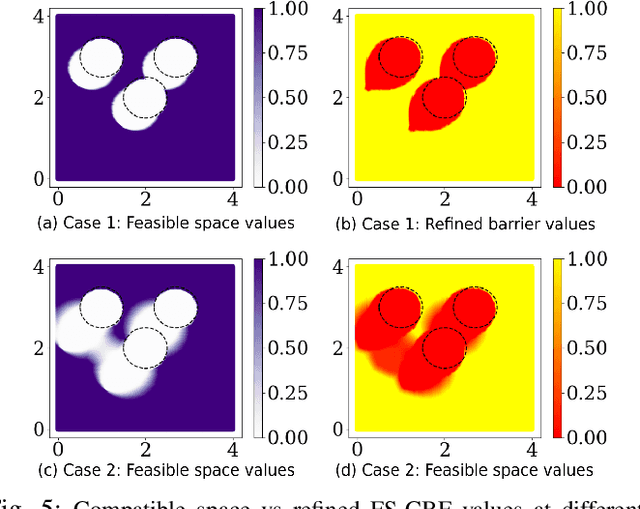
Quadratic programs (QP) subject to multiple time-dependent control barrier function (CBF) based constraints have been used to design safety-critical controllers. However, ensuring the existence of a solution at all times to the QP subject to multiple CBF constraints is non-trivial. We quantify the feasible solution space of the QP in terms of its volume. We introduce a novel feasible space volume monitoring control barrier function that promotes compatibility of barrier functions and, hence, existence of a solution at all times. We show empirically that our approach not only enhances feasibility but also exhibits reduced sensitivity to changes in the hyperparameters such as gains of nominal controller. Finally, paired with a global planner, we evaluate our controller for navigation among humans in the AWS Hospital gazebo environment. The proposed controller is demonstrated to outperform the standard CBF-QP controller in maintaining feasibility.
The Boundaries of Verifiable Accuracy, Robustness, and Generalisation in Deep Learning
Sep 13, 2023In this work, we assess the theoretical limitations of determining guaranteed stability and accuracy of neural networks in classification tasks. We consider classical distribution-agnostic framework and algorithms minimising empirical risks and potentially subjected to some weights regularisation. We show that there is a large family of tasks for which computing and verifying ideal stable and accurate neural networks in the above settings is extremely challenging, if at all possible, even when such ideal solutions exist within the given class of neural architectures.
A Neurosymbolic Approach to the Verification of Temporal Logic Properties of Learning enabled Control Systems
Mar 07, 2023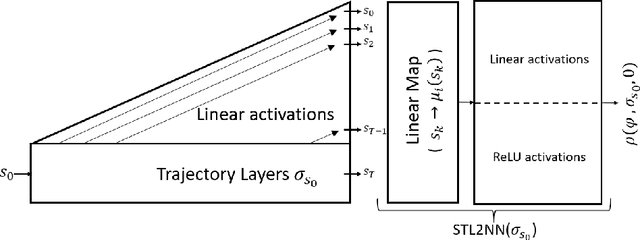

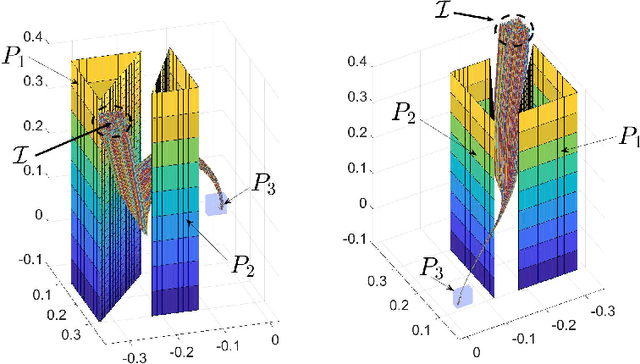
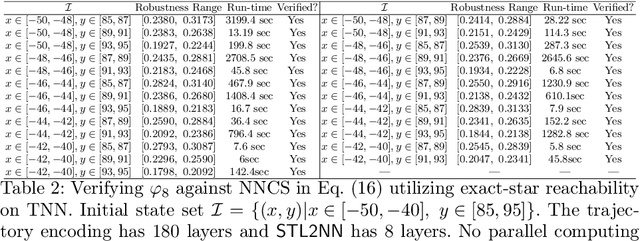
Signal Temporal Logic (STL) has become a popular tool for expressing formal requirements of Cyber-Physical Systems (CPS). The problem of verifying STL properties of neural network-controlled CPS remains a largely unexplored problem. In this paper, we present a model for the verification of Neural Network (NN) controllers for general STL specifications using a custom neural architecture where we map an STL formula into a feed-forward neural network with ReLU activation. In the case where both our plant model and the controller are ReLU-activated neural networks, we reduce the STL verification problem to reachability in ReLU neural networks. We also propose a new approach for neural network controllers with general activation functions; this approach is a sound and complete verification approach based on computing the Lipschitz constant of the closed-loop control system. We demonstrate the practical efficacy of our techniques on a number of examples of learning-enabled control systems.
Model-based Evaluation of Driver Control Workloads in Haptic-based Driver Assistance Systems
Oct 24, 2022



This study presents a novel approach for modeling and simulating human-vehicle interactions in order to examine the effects of automated driving systems (ADS) on driving performance and driver control workload. Existing driver-ADS interaction studies have relied on simulated or real-world human driver experiments that are limited in providing objective evaluation of the dynamic interactions and control workloads on the driver. Our approach leverages an integrated human model-based active driving system (HuMADS) to simulate the dynamic interaction between the driver model and the haptic-based ADS during a vehicle overtaking task. Two driver arm-steering models were developed for both tense and relaxed human driver conditions and validated against experimental data. We conducted a simulation study to evaluate the effects of three different haptic shared control conditions (based on the presence and type of control conflict) on overtaking task performance and driver workloads. We found that No Conflict shared control scenarios result in improved driving performance and reduced control workloads, while Conflict scenarios result in unsafe maneuvers and increased workloads. These findings, which are consistent with experimental studies, demonstrate the potential for our approach to improving future ADS design for safer driver assistance systems.