 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeasible Space Monitoring for Multiple Control Barrier Functions with application to Large Scale Indoor Navigation
Paper and Code
Dec 12, 2023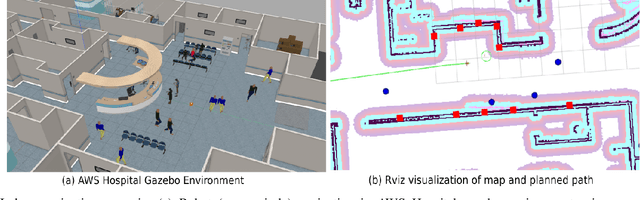
Quadratic programs (QP) subject to multiple time-dependent control barrier function (CBF) based constraints have been used to design safety-critical controllers. However, ensuring the existence of a solution at all times to the QP subject to multiple CBF constraints is non-trivial. We quantify the feasible solution space of the QP in terms of its volume. We introduce a novel feasible space volume monitoring control barrier function that promotes compatibility of barrier functions and, hence, existence of a solution at all times. We show empirically that our approach not only enhances feasibility but also exhibits reduced sensitivity to changes in the hyperparameters such as gains of nominal controller. Finally, paired with a global planner, we evaluate our controller for navigation among humans in the AWS Hospital gazebo environment. The proposed controller is demonstrated to outperform the standard CBF-QP controller in maintaining feasibility.