 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Neurosymbolic Approach to the Verification of Temporal Logic Properties of Learning enabled Control Systems
Mar 07, 2023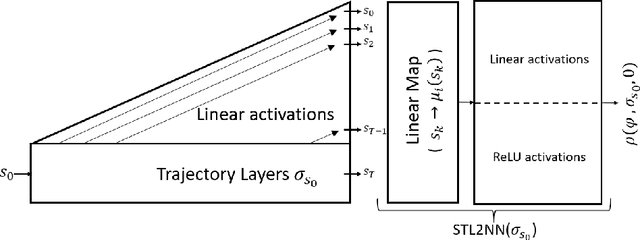

Signal Temporal Logic (STL) has become a popular tool for expressing formal requirements of Cyber-Physical Systems (CPS). The problem of verifying STL properties of neural network-controlled CPS remains a largely unexplored problem. In this paper, we present a model for the verification of Neural Network (NN) controllers for general STL specifications using a custom neural architecture where we map an STL formula into a feed-forward neural network with ReLU activation. In the case where both our plant model and the controller are ReLU-activated neural networks, we reduce the STL verification problem to reachability in ReLU neural networks. We also propose a new approach for neural network controllers with general activation functions; this approach is a sound and complete verification approach based on computing the Lipschitz constant of the closed-loop control system. We demonstrate the practical efficacy of our techniques on a number of examples of learning-enabled control systems.
Ultrafast single-channel machine vision based on neuro-inspired photonic computing
Feb 15, 2023High-speed machine vision is increasing its importance in both scientific and technological applications. Neuro-inspired photonic computing is a promising approach to speed-up machine vision processing with ultralow latency. However, the processing rate is fundamentally limited by the low frame rate of image sensors, typically operating at tens of hertz. Here, we propose an image-sensor-free machine vision framework, which optically processes real-world visual information with only a single input channel, based on a random temporal encoding technique. This approach allows for compressive acquisitions of visual information with a single channel at gigahertz rates, outperforming conventional approaches, and enables its direct photonic processing using a photonic reservoir computer in a time domain. We experimentally demonstrate that the proposed approach is capable of high-speed image recognition and anomaly detection, and furthermore, it can be used for high-speed imaging. The proposed approach is multipurpose and can be extended for a wide range of applications, including tracking, controlling, and capturing sub-nanosecond phenomena.
Risk-Awareness in Learning Neural Controllers for Temporal Logic Objectives
Oct 14, 2022
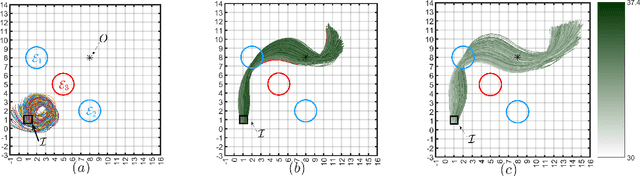
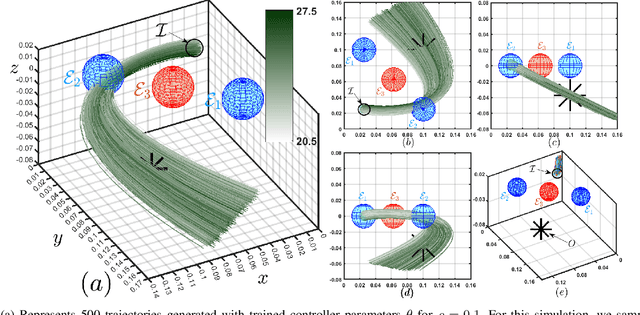
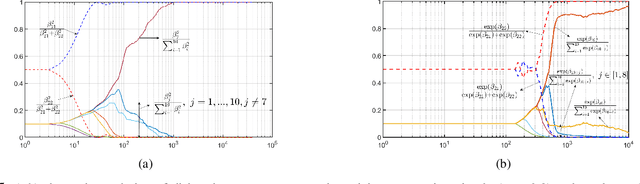
In this paper, we consider the problem of synthesizing a controller in the presence of uncertainty such that the resulting closed-loop system satisfies certain hard constraints while optimizing certain (soft) performance objectives. We assume that the hard constraints encoding safety or mission-critical task objectives are expressed using Signal Temporal Logic (STL), while performance is quantified using standard cost functions on system trajectories. In order to prioritize the satisfaction of the hard STL constraints, we utilize the framework of control barrier functions (CBFs) and algorithmically obtain CBFs for STL objectives. We assume that the controllers are modeled using neural networks (NNs) and provide an optimization algorithm to learn the optimal parameters for the NN controller that optimize the performance at a user-specified robustness margin for the safety specifications. We use the formalism of risk measures to evaluate the risk incurred by the trade-off between robustness margin of the system and its performance. We demonstrate the efficacy of our approach on well-known difficult examples for nonlinear control such as a quad-rotor and a unicycle, where the mission objectives for each system include hard timing constraints and safety objectives.
Risk-Bounded Control with Kalman Filtering and Stochastic Barrier Functions
Dec 30, 2021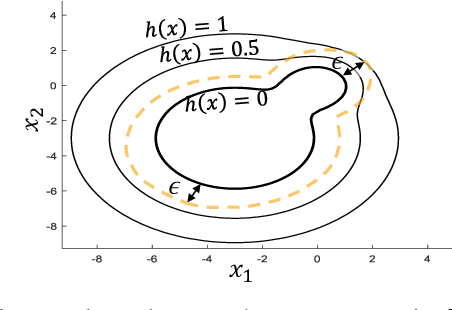
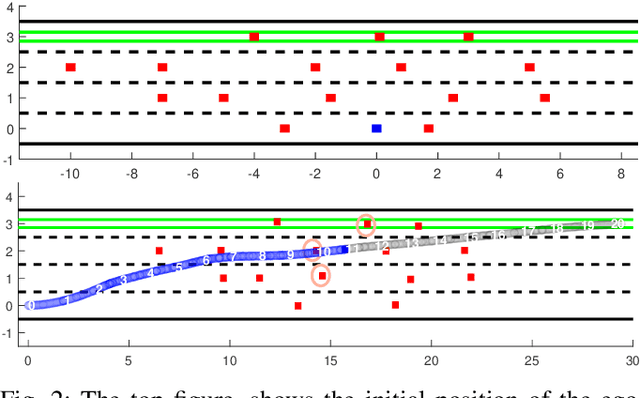
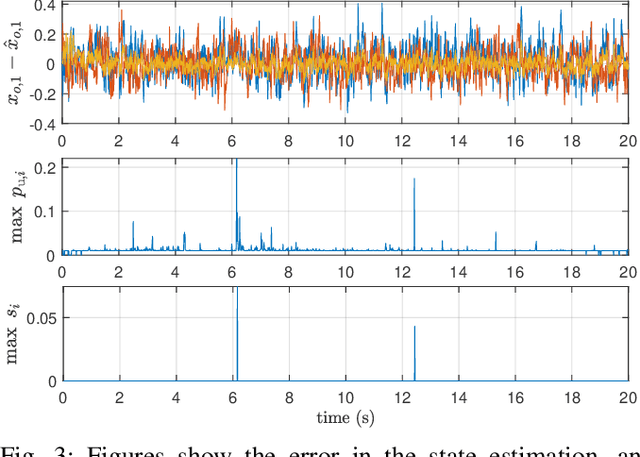
In this paper, we study Stochastic Control Barrier Functions (SCBFs) to enable the design of probabilistic safe real-time controllers in presence of uncertainties and based on noisy measurements. Our goal is to design controllers that bound the probability of a system failure in finite-time to a given desired value. To that end, we first estimate the system states from the noisy measurements using an Extended Kalman filter, and compute confidence intervals on the filtering errors. Then, we account for filtering errors and derive sufficient conditions on the control input based on the estimated states to bound the probability that the real states of the system enter an unsafe region within a finite time interval. We show that these sufficient conditions are linear constraints on the control input, and, hence, they can be used in tractable optimization problems to achieve safety, in addition to other properties like reachability, and stability. Our approach is evaluated using a simulation of a lane-changing scenario on a highway with dense traffic.
PerceMon: Online Monitoring for Perception Systems
Aug 17, 2021
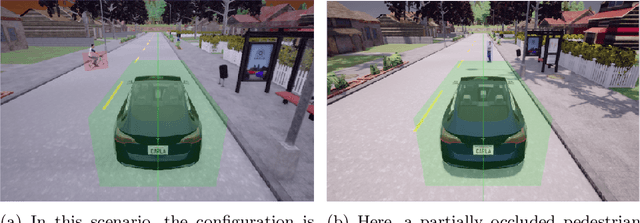
Perception algorithms in autonomous vehicles are vital for the vehicle to understand the semantics of its surroundings, including detection and tracking of objects in the environment. The outputs of these algorithms are in turn used for decision-making in safety-critical scenarios like collision avoidance, and automated emergency braking. Thus, it is crucial to monitor such perception systems at runtime. However, due to the high-level, complex representations of the outputs of perception systems, it is a challenge to test and verify these systems, especially at runtime. In this paper, we present a runtime monitoring tool, PerceMon that can monitor arbitrary specifications in Timed Quality Temporal Logic (TQTL) and its extensions with spatial operators. We integrate the tool with the CARLA autonomous vehicle simulation environment and the ROS middleware platform while monitoring properties on state-of-the-art object detection and tracking algorithms.
Reachability Analysis of Convolutional Neural Networks
Jun 22, 2021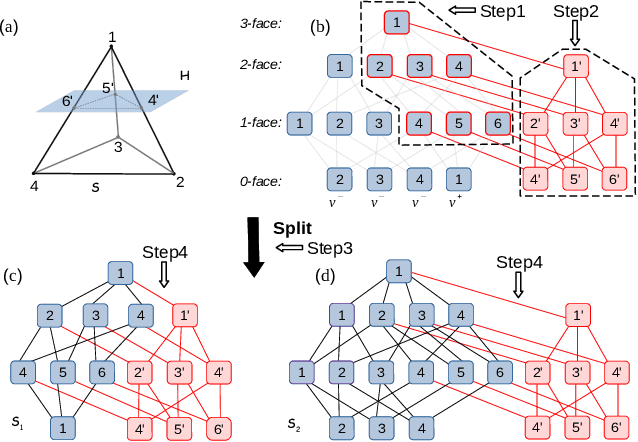

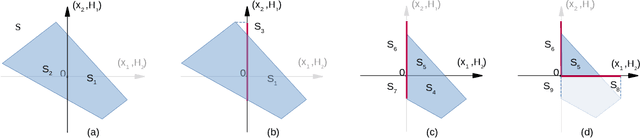
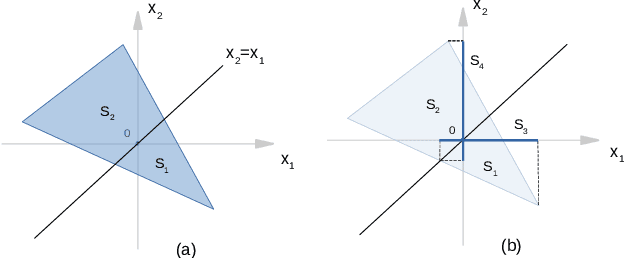
Deep convolutional neural networks have been widely employed as an effective technique to handle complex and practical problems. However, one of the fundamental problems is the lack of formal methods to analyze their behavior. To address this challenge, we propose an approach to compute the exact reachable sets of a network given an input domain, where the reachable set is represented by the face lattice structure. Besides the computation of reachable sets, our approach is also capable of backtracking to the input domain given an output reachable set. Therefore, a full analysis of a network's behavior can be realized. In addition, an approach for fast analysis is also introduced, which conducts fast computation of reachable sets by considering selected sensitive neurons in each layer. The exact pixel-level reachability analysis method is evaluated on a CNN for the CIFAR10 dataset and compared to related works. The fast analysis method is evaluated over a CNN CIFAR10 dataset and VGG16 architecture for the ImageNet dataset.
Safe Navigation in Human Occupied Environments Using Sampling and Control Barrier Functions
May 03, 2021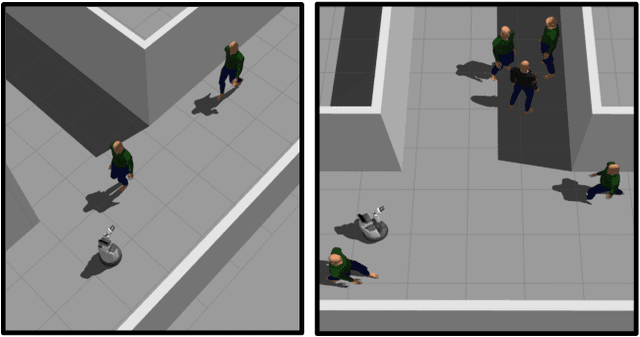
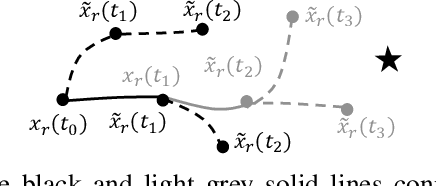
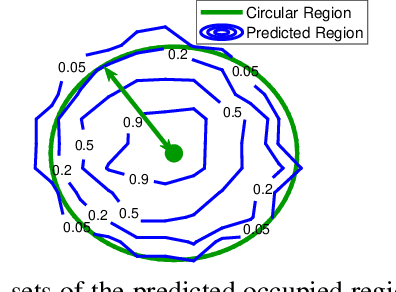
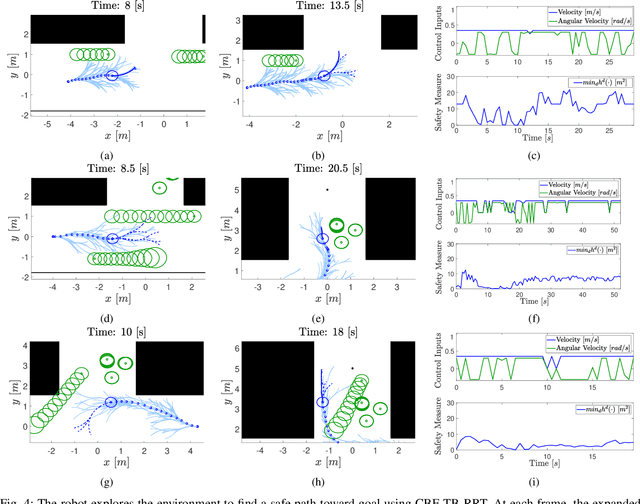
Sampling-based methods such as Rapidly-exploring Random Trees (RRTs) have been widely used for generating motion paths for autonomous mobile systems. In this work, we extend time-based RRTs with Control Barrier Functions (CBFs) to generate, safe motion plans in dynamic environments with many pedestrians. Our framework is based upon a human motion prediction model which is well suited for indoor narrow environments. We demonstrate our approach on a high-fidelity model of the Toyota Human Support Robot navigating in narrow corridors. We show in three scenarios that our proposed online method can navigate safely in the presence of moving agents with unknown dynamics.