 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards learning-based planning:The nuPlan benchmark for real-world autonomous driving
Mar 07, 2024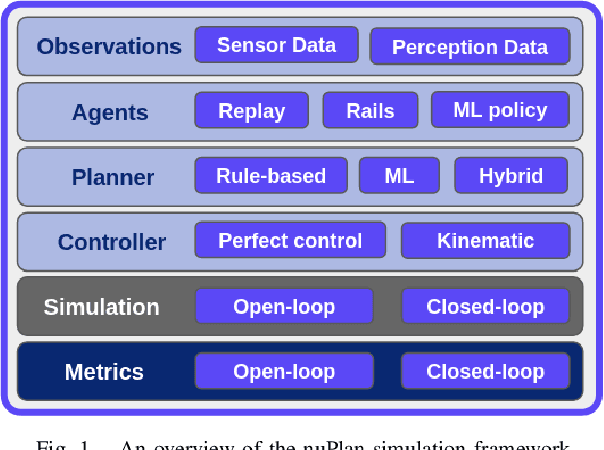
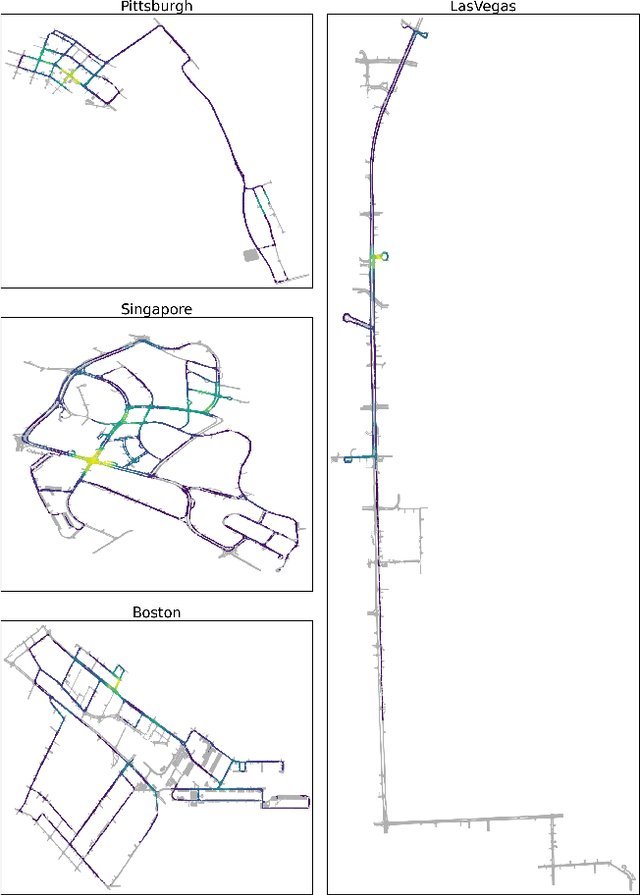
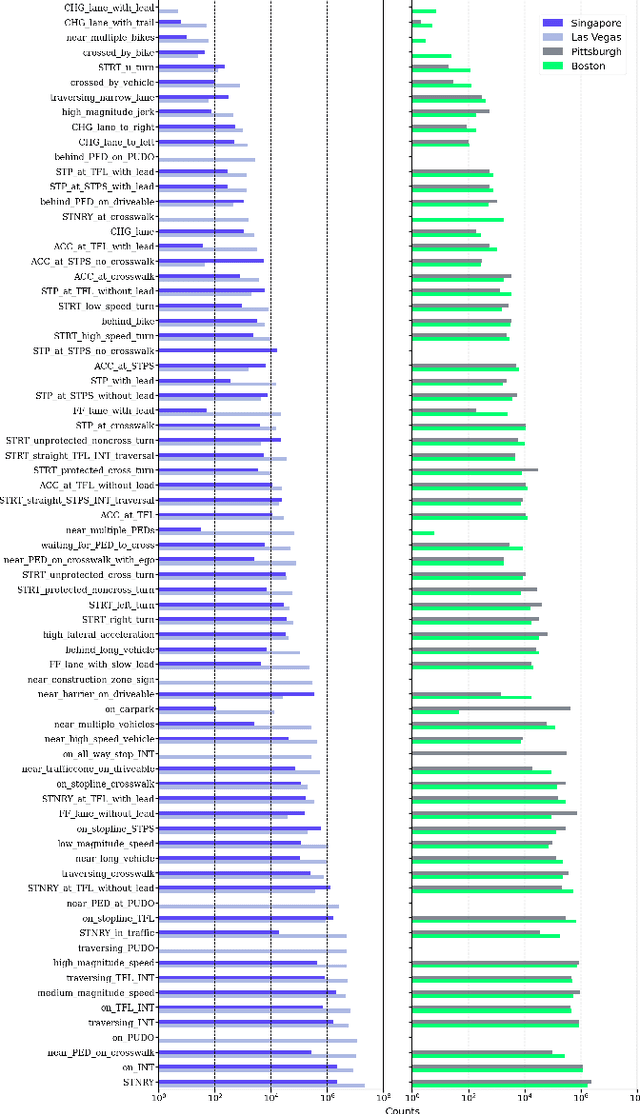
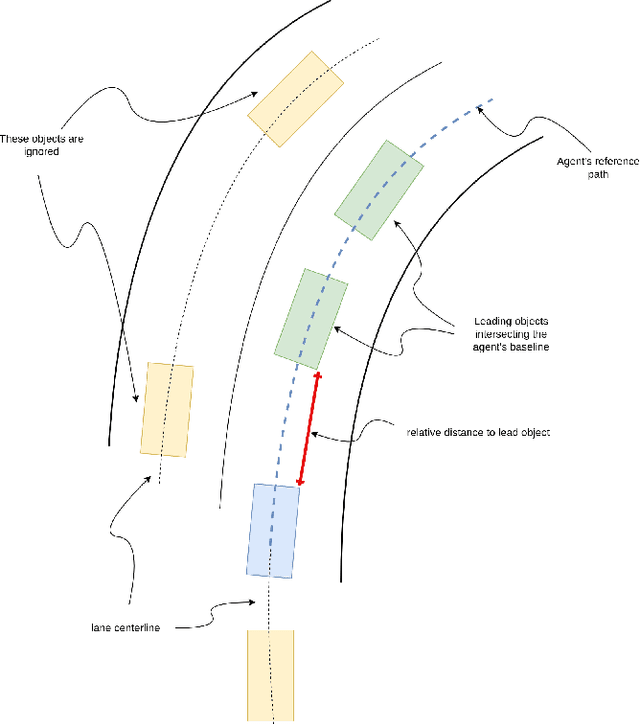
Machine Learning (ML) has replaced traditional handcrafted methods for perception and prediction in autonomous vehicles. Yet for the equally important planning task, the adoption of ML-based techniques is slow. We present nuPlan, the world's first real-world autonomous driving dataset, and benchmark. The benchmark is designed to test the ability of ML-based planners to handle diverse driving situations and to make safe and efficient decisions. To that end, we introduce a new large-scale dataset that consists of 1282 hours of diverse driving scenarios from 4 cities (Las Vegas, Boston, Pittsburgh, and Singapore) and includes high-quality auto-labeled object tracks and traffic light data. We exhaustively mine and taxonomize common and rare driving scenarios which are used during evaluation to get fine-grained insights into the performance and characteristics of a planner. Beyond the dataset, we provide a simulation and evaluation framework that enables a planner's actions to be simulated in closed-loop to account for interactions with other traffic participants. We present a detailed analysis of numerous baselines and investigate gaps between ML-based and traditional methods. Find the nuPlan dataset and code at nuplan.org.
Risk-Bounded Control with Kalman Filtering and Stochastic Barrier Functions
Dec 30, 2021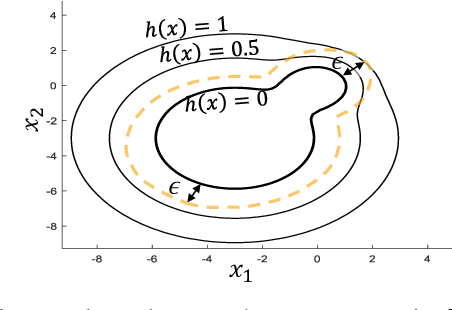
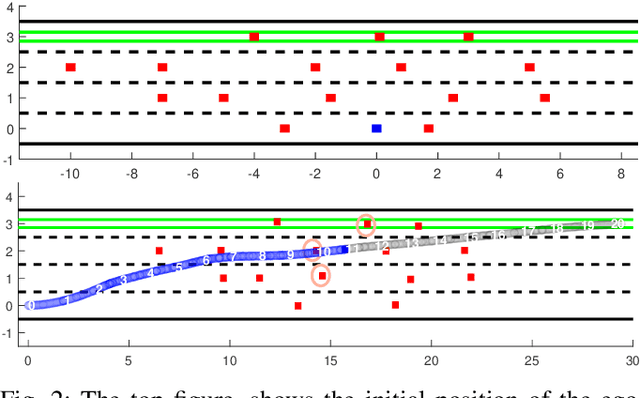
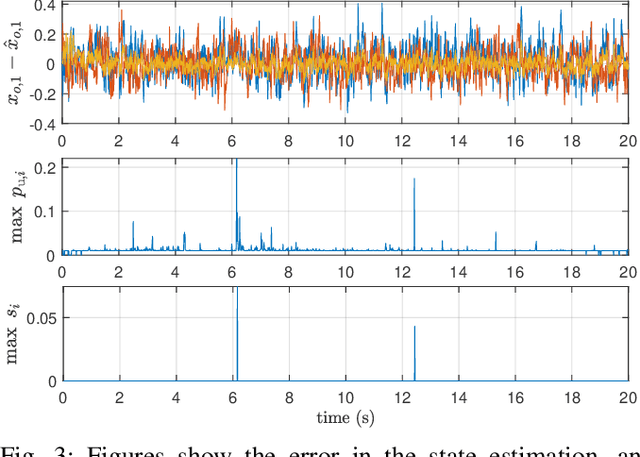
In this paper, we study Stochastic Control Barrier Functions (SCBFs) to enable the design of probabilistic safe real-time controllers in presence of uncertainties and based on noisy measurements. Our goal is to design controllers that bound the probability of a system failure in finite-time to a given desired value. To that end, we first estimate the system states from the noisy measurements using an Extended Kalman filter, and compute confidence intervals on the filtering errors. Then, we account for filtering errors and derive sufficient conditions on the control input based on the estimated states to bound the probability that the real states of the system enter an unsafe region within a finite time interval. We show that these sufficient conditions are linear constraints on the control input, and, hence, they can be used in tractable optimization problems to achieve safety, in addition to other properties like reachability, and stability. Our approach is evaluated using a simulation of a lane-changing scenario on a highway with dense traffic.
Safe Navigation in Human Occupied Environments Using Sampling and Control Barrier Functions
May 03, 2021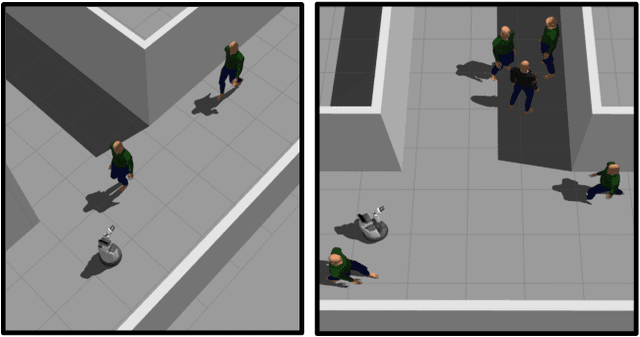
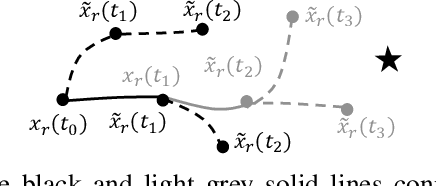
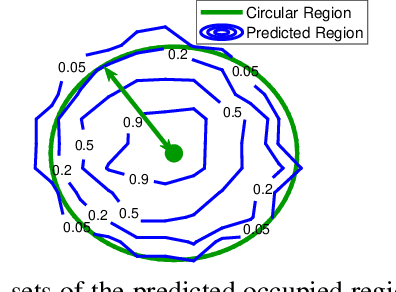
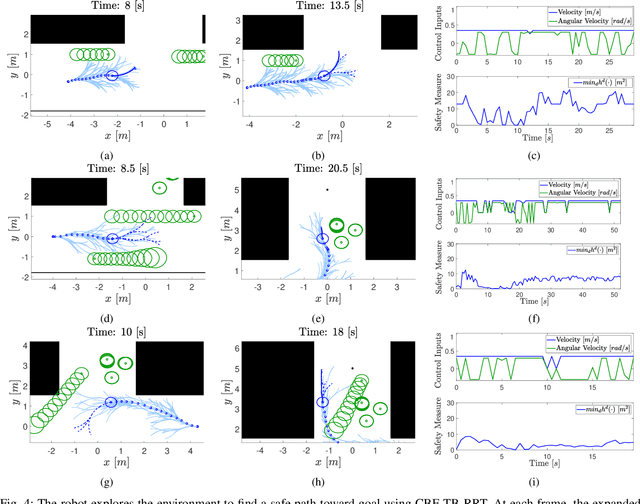
Sampling-based methods such as Rapidly-exploring Random Trees (RRTs) have been widely used for generating motion paths for autonomous mobile systems. In this work, we extend time-based RRTs with Control Barrier Functions (CBFs) to generate, safe motion plans in dynamic environments with many pedestrians. Our framework is based upon a human motion prediction model which is well suited for indoor narrow environments. We demonstrate our approach on a high-fidelity model of the Toyota Human Support Robot navigating in narrow corridors. We show in three scenarios that our proposed online method can navigate safely in the presence of moving agents with unknown dynamics.
Training Neural Network Controllers Using Control Barrier Functions in the Presence of Disturbances
Jan 18, 2020
Control Barrier Functions (CBF) have been recently utilized in the design of provably safe feedback control laws for nonlinear systems. These feedback control methods typically compute the next control input by solving an online Quadratic Program (QP). Solving QP in real-time can be a computationally expensive process for resource constraint systems. In this work, we propose to use imitation learning to learn Neural Network-based feedback controllers which will satisfy the CBF constraints. In the process, we also develop a new class of High Order CBF for systems under external disturbances. We demonstrate the framework on a unicycle model subject to external disturbances, e.g., wind or currents.
Gray-box Adversarial Testing for Control Systems with Machine Learning Component
Dec 31, 2018



Neural Networks (NN) have been proposed in the past as an effective means for both modeling and control of systems with very complex dynamics. However, despite the extensive research, NN-based controllers have not been adopted by the industry for safety critical systems. The primary reason is that systems with learning based controllers are notoriously hard to test and verify. Even harder is the analysis of such systems against system-level specifications. In this paper, we provide a gradient based method for searching the input space of a closed-loop control system in order to find adversarial samples against some system-level requirements. Our experimental results show that combined with randomized search, our method outperforms Simulated Annealing optimization.