 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards learning-based planning:The nuPlan benchmark for real-world autonomous driving
Mar 07, 2024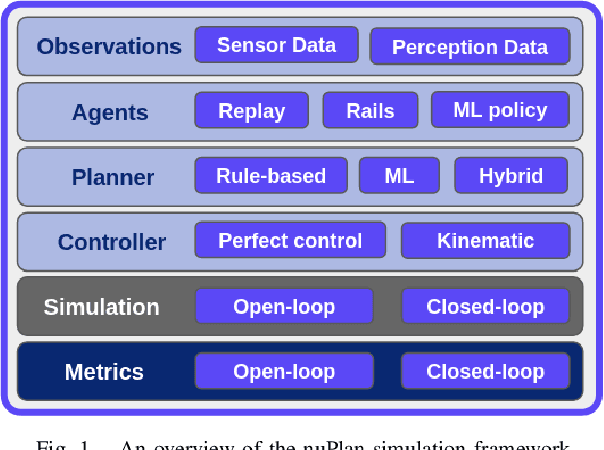
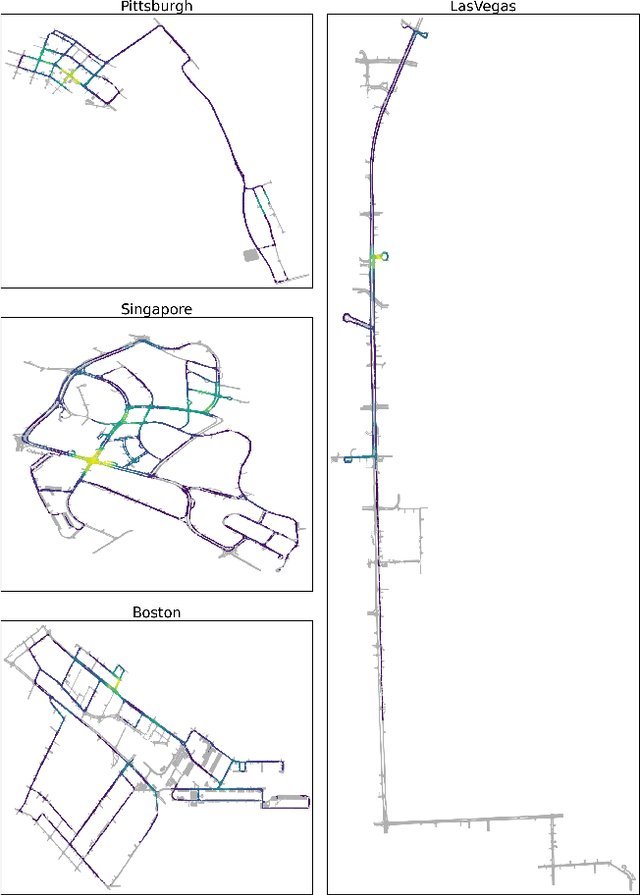
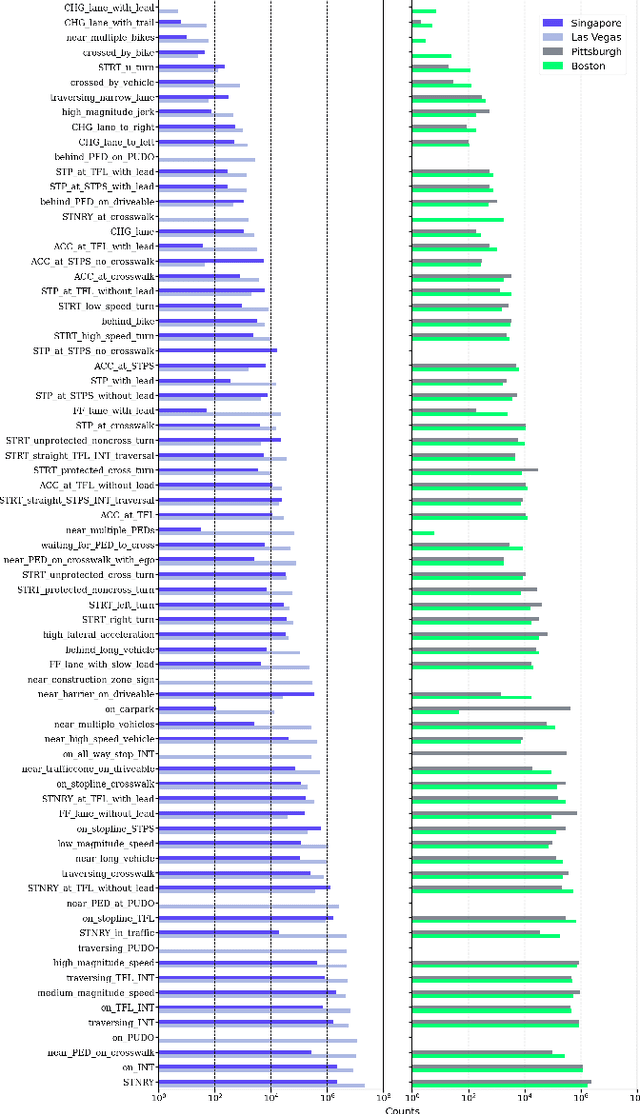
Machine Learning (ML) has replaced traditional handcrafted methods for perception and prediction in autonomous vehicles. Yet for the equally important planning task, the adoption of ML-based techniques is slow. We present nuPlan, the world's first real-world autonomous driving dataset, and benchmark. The benchmark is designed to test the ability of ML-based planners to handle diverse driving situations and to make safe and efficient decisions. To that end, we introduce a new large-scale dataset that consists of 1282 hours of diverse driving scenarios from 4 cities (Las Vegas, Boston, Pittsburgh, and Singapore) and includes high-quality auto-labeled object tracks and traffic light data. We exhaustively mine and taxonomize common and rare driving scenarios which are used during evaluation to get fine-grained insights into the performance and characteristics of a planner. Beyond the dataset, we provide a simulation and evaluation framework that enables a planner's actions to be simulated in closed-loop to account for interactions with other traffic participants. We present a detailed analysis of numerous baselines and investigate gaps between ML-based and traditional methods. Find the nuPlan dataset and code at nuplan.org.
Driving in Real Life with Inverse Reinforcement Learning
Jun 07, 2022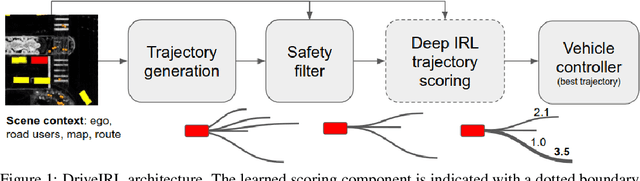

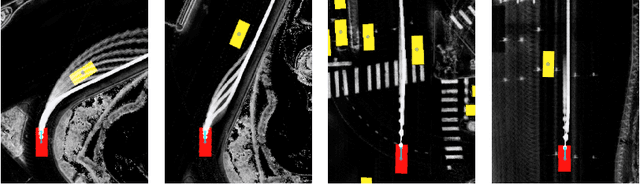
In this paper, we introduce the first learning-based planner to drive a car in dense, urban traffic using Inverse Reinforcement Learning (IRL). Our planner, DriveIRL, generates a diverse set of trajectory proposals, filters these trajectories with a lightweight and interpretable safety filter, and then uses a learned model to score each remaining trajectory. The best trajectory is then tracked by the low-level controller of our self-driving vehicle. We train our trajectory scoring model on a 500+ hour real-world dataset of expert driving demonstrations in Las Vegas within the maximum entropy IRL framework. DriveIRL's benefits include: a simple design due to only learning the trajectory scoring function, relatively interpretable features, and strong real-world performance. We validated DriveIRL on the Las Vegas Strip and demonstrated fully autonomous driving in heavy traffic, including scenarios involving cut-ins, abrupt braking by the lead vehicle, and hotel pickup/dropoff zones. Our dataset will be made public to help further research in this area.
VATLD: A Visual Analytics System to Assess, Understand and Improve Traffic Light Detection
Sep 27, 2020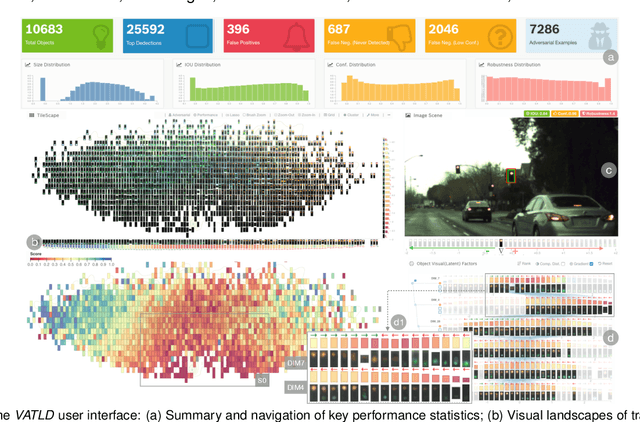
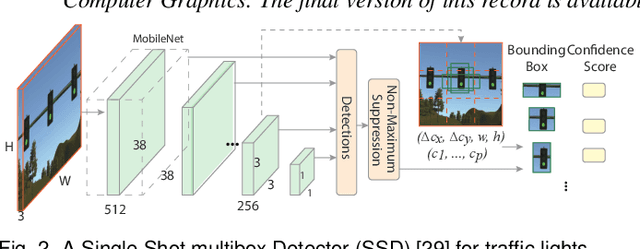

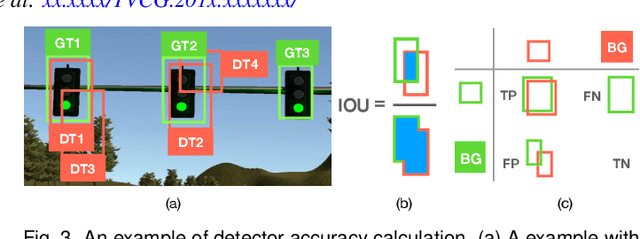
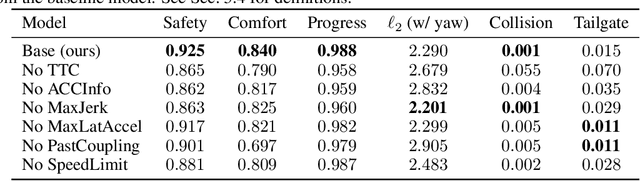
Traffic light detection is crucial for environment perception and decision-making in autonomous driving. State-of-the-art detectors are built upon deep Convolutional Neural Networks (CNNs) and have exhibited promising performance. However, one looming concern with CNN based detectors is how to thoroughly evaluate the performance of accuracy and robustness before they can be deployed to autonomous vehicles. In this work, we propose a visual analytics system, VATLD, equipped with a disentangled representation learning and semantic adversarial learning, to assess, understand, and improve the accuracy and robustness of traffic light detectors in autonomous driving applications. The disentangled representation learning extracts data semantics to augment human cognition with human-friendly visual summarization, and the semantic adversarial learning efficiently exposes interpretable robustness risks and enables minimal human interaction for actionable insights. We also demonstrate the effectiveness of various performance improvement strategies derived from actionable insights with our visual analytics system, VATLD, and illustrate some practical implications for safety-critical applications in autonomous driving.
Improve Unsupervised Domain Adaptation with Mixup Training
Jan 03, 2020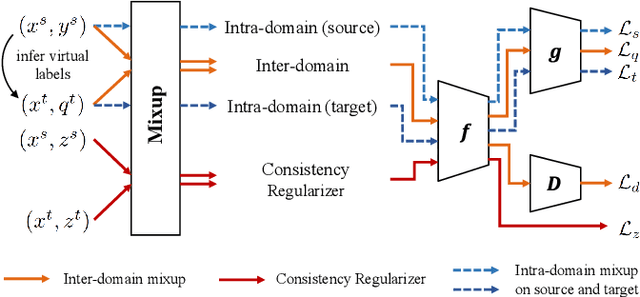
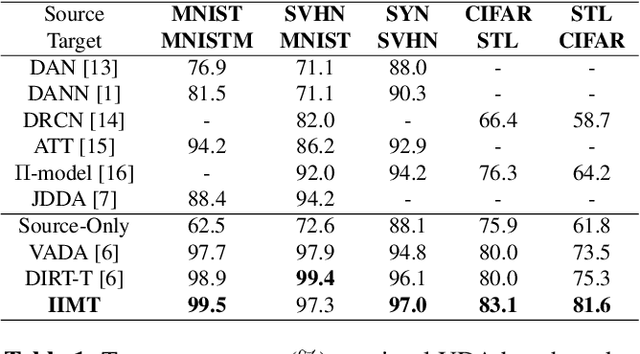
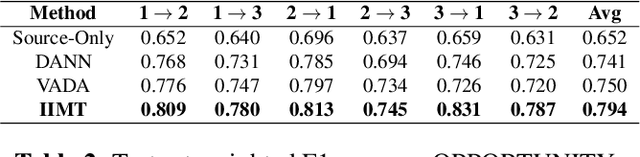
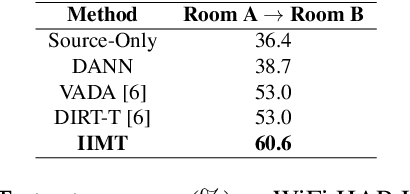
Unsupervised domain adaptation studies the problem of utilizing a relevant source domain with abundant labels to build predictive modeling for an unannotated target domain. Recent work observe that the popular adversarial approach of learning domain-invariant features is insufficient to achieve desirable target domain performance and thus introduce additional training constraints, e.g. cluster assumption. However, these approaches impose the constraints on source and target domains individually, ignoring the important interplay between them. In this work, we propose to enforce training constraints across domains using mixup formulation to directly address the generalization performance for target data. In order to tackle potentially huge domain discrepancy, we further propose a feature-level consistency regularizer to facilitate the inter-domain constraint. When adding intra-domain mixup and domain adversarial learning, our general framework significantly improves state-of-the-art performance on several important tasks from both image classification and human activity recognition.