 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards learning-based planning:The nuPlan benchmark for real-world autonomous driving
Mar 07, 2024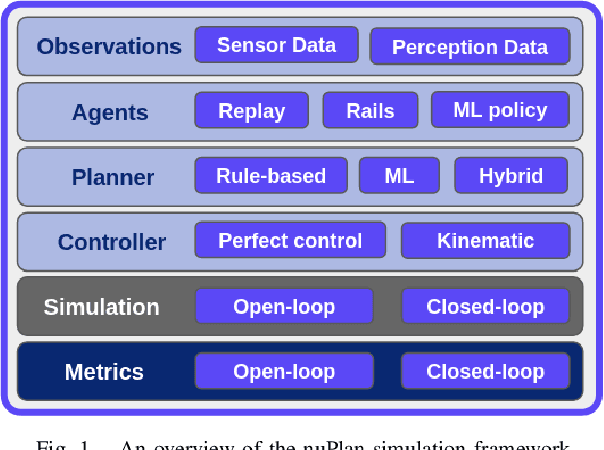
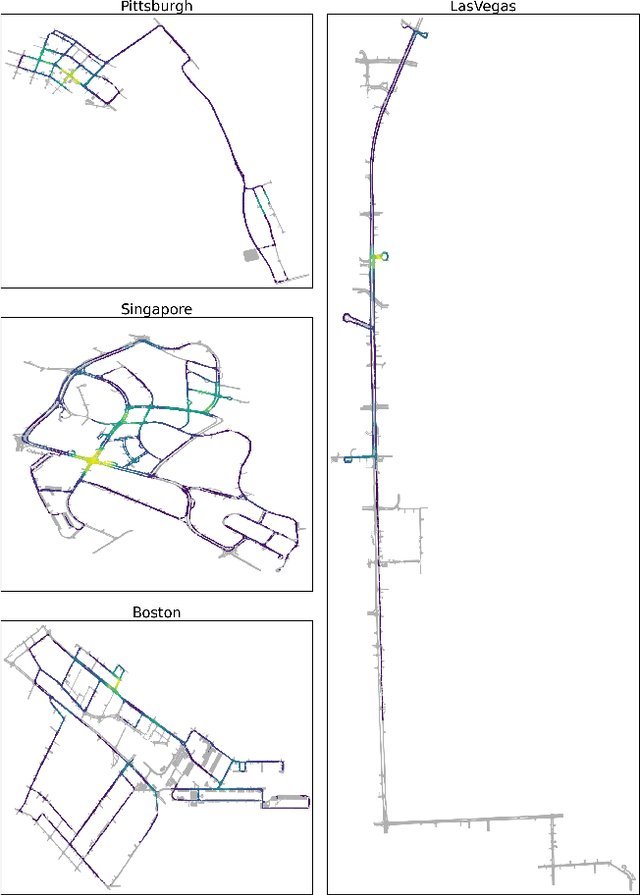
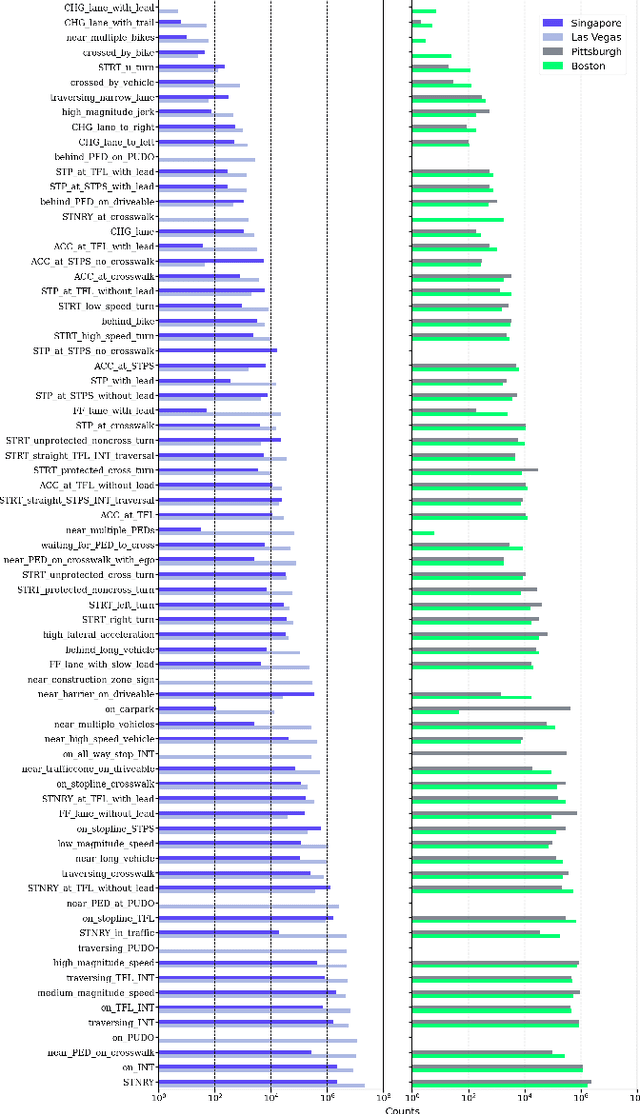
Machine Learning (ML) has replaced traditional handcrafted methods for perception and prediction in autonomous vehicles. Yet for the equally important planning task, the adoption of ML-based techniques is slow. We present nuPlan, the world's first real-world autonomous driving dataset, and benchmark. The benchmark is designed to test the ability of ML-based planners to handle diverse driving situations and to make safe and efficient decisions. To that end, we introduce a new large-scale dataset that consists of 1282 hours of diverse driving scenarios from 4 cities (Las Vegas, Boston, Pittsburgh, and Singapore) and includes high-quality auto-labeled object tracks and traffic light data. We exhaustively mine and taxonomize common and rare driving scenarios which are used during evaluation to get fine-grained insights into the performance and characteristics of a planner. Beyond the dataset, we provide a simulation and evaluation framework that enables a planner's actions to be simulated in closed-loop to account for interactions with other traffic participants. We present a detailed analysis of numerous baselines and investigate gaps between ML-based and traditional methods. Find the nuPlan dataset and code at nuplan.org.
Vision and Learning for Deliberative Monocular Cluttered Flight
Nov 24, 2014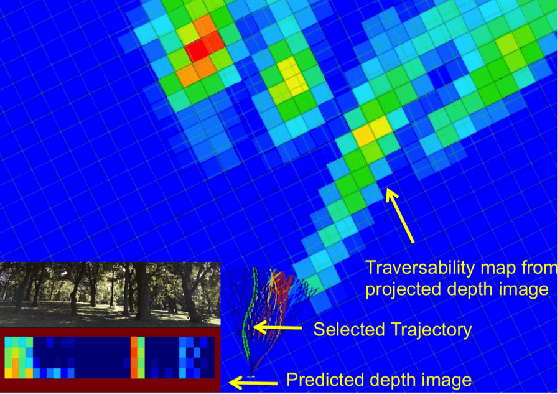
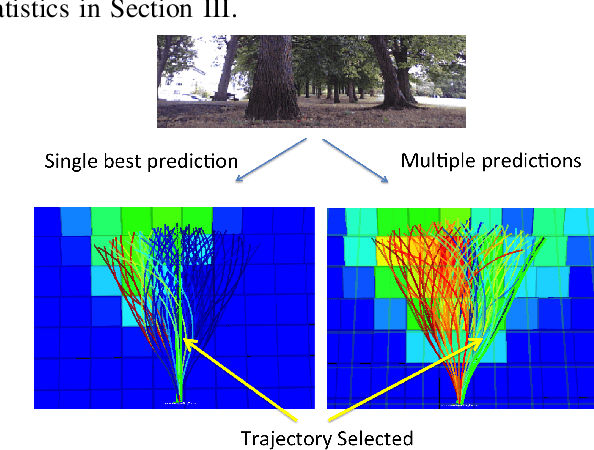
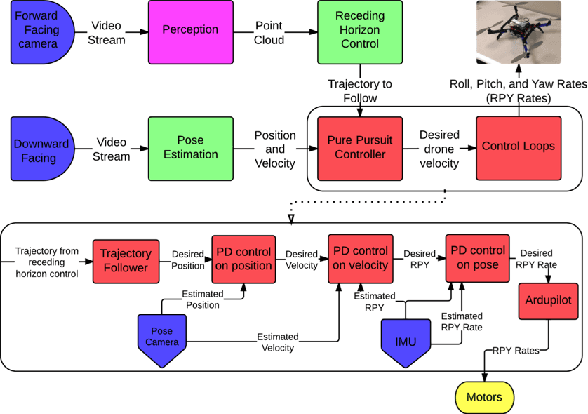
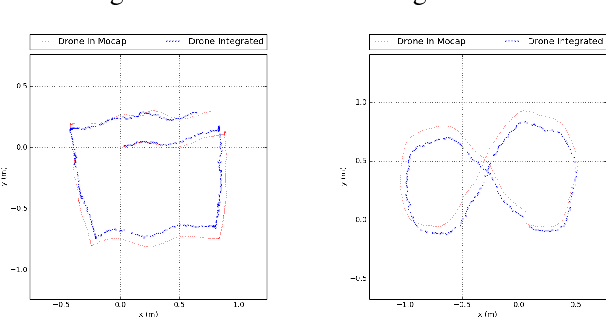
Cameras provide a rich source of information while being passive, cheap and lightweight for small and medium Unmanned Aerial Vehicles (UAVs). In this work we present the first implementation of receding horizon control, which is widely used in ground vehicles, with monocular vision as the only sensing mode for autonomous UAV flight in dense clutter. We make it feasible on UAVs via a number of contributions: novel coupling of perception and control via relevant and diverse, multiple interpretations of the scene around the robot, leveraging recent advances in machine learning to showcase anytime budgeted cost-sensitive feature selection, and fast non-linear regression for monocular depth prediction. We empirically demonstrate the efficacy of our novel pipeline via real world experiments of more than 2 kms through dense trees with a quadrotor built from off-the-shelf parts. Moreover our pipeline is designed to combine information from other modalities like stereo and lidar as well if available.