 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalk through Paintings: Egocentric World Models from Internet Priors
Jan 21, 2026What if a video generation model could not only imagine a plausible future, but the correct one, accurately reflecting how the world changes with each action? We address this question by presenting the Egocentric World Model (EgoWM), a simple, architecture-agnostic method that transforms any pretrained video diffusion model into an action-conditioned world model, enabling controllable future prediction. Rather than training from scratch, we repurpose the rich world priors of Internet-scale video models and inject motor commands through lightweight conditioning layers. This allows the model to follow actions faithfully while preserving realism and strong generalization. Our approach scales naturally across embodiments and action spaces, ranging from 3-DoF mobile robots to 25-DoF humanoids, where predicting egocentric joint-angle-driven dynamics is substantially more challenging. The model produces coherent rollouts for both navigation and manipulation tasks, requiring only modest fine-tuning. To evaluate physical correctness independently of visual appearance, we introduce the Structural Consistency Score (SCS), which measures whether stable scene elements evolve consistently with the provided actions. EgoWM improves SCS by up to 80 percent over prior state-of-the-art navigation world models, while achieving up to six times lower inference latency and robust generalization to unseen environments, including navigation inside paintings.
Diff-2-in-1: Bridging Generation and Dense Perception with Diffusion Models
Nov 07, 2024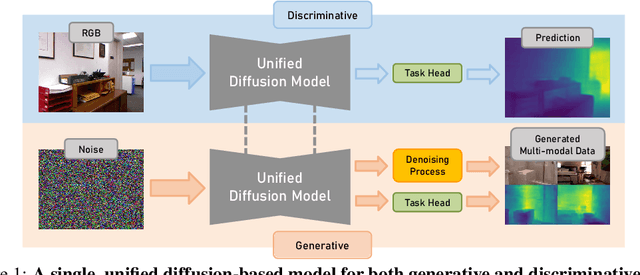
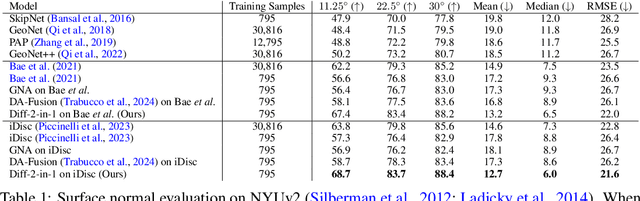
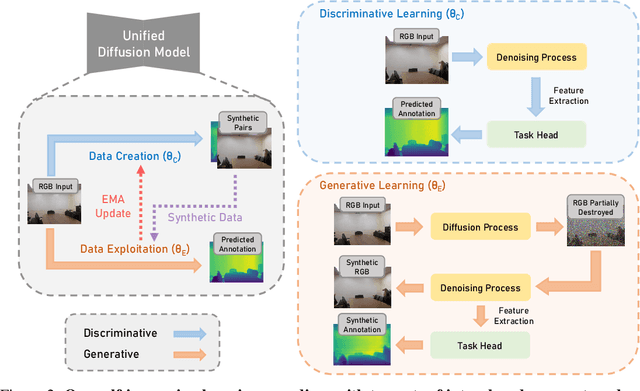
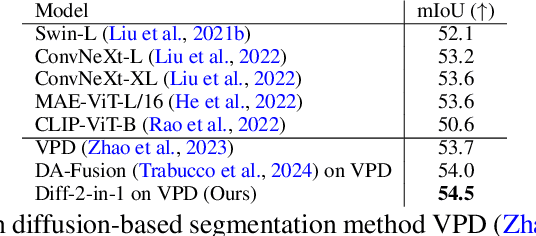
Beyond high-fidelity image synthesis, diffusion models have recently exhibited promising results in dense visual perception tasks. However, most existing work treats diffusion models as a standalone component for perception tasks, employing them either solely for off-the-shelf data augmentation or as mere feature extractors. In contrast to these isolated and thus sub-optimal efforts, we introduce a unified, versatile, diffusion-based framework, Diff-2-in-1, that can simultaneously handle both multi-modal data generation and dense visual perception, through a unique exploitation of the diffusion-denoising process. Within this framework, we further enhance discriminative visual perception via multi-modal generation, by utilizing the denoising network to create multi-modal data that mirror the distribution of the original training set. Importantly, Diff-2-in-1 optimizes the utilization of the created diverse and faithful data by leveraging a novel self-improving learning mechanism. Comprehensive experimental evaluations validate the effectiveness of our framework, showcasing consistent performance improvements across various discriminative backbones and high-quality multi-modal data generation characterized by both realism and usefulness.
ReferEverything: Towards Segmenting Everything We Can Speak of in Videos
Oct 30, 2024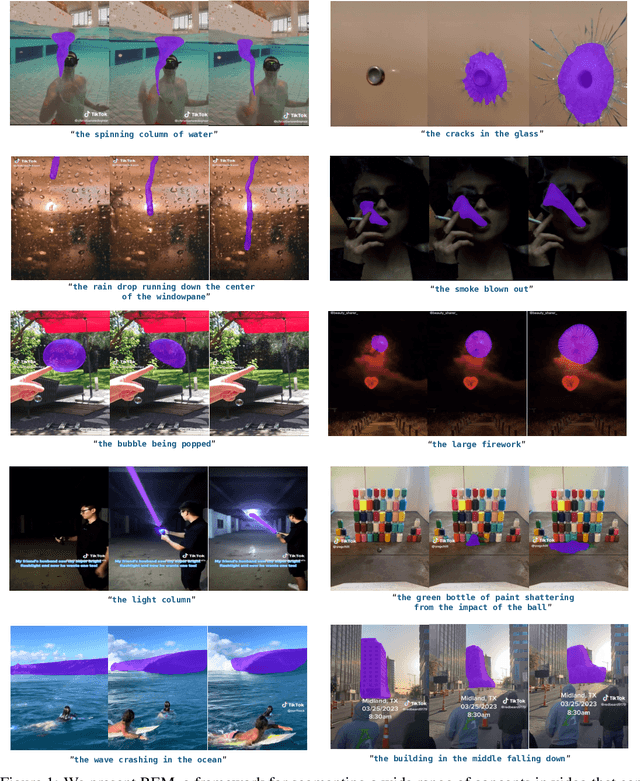


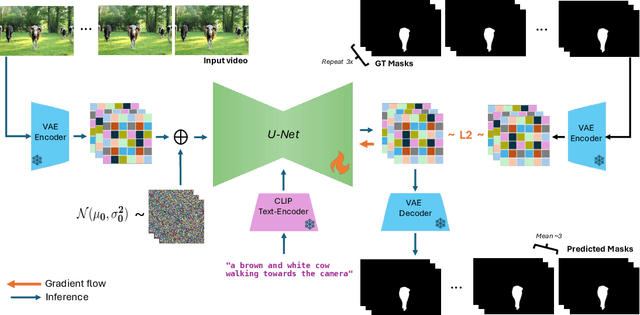
We present REM, a framework for segmenting a wide range of concepts in video that can be described through natural language. Our method capitalizes on visual-language representations learned by video diffusion models on Internet-scale datasets. A key insight of our approach is preserving as much of the generative model's original representation as possible, while fine-tuning it on narrow-domain Referral Object Segmentation datasets. As a result, our framework can accurately segment and track rare and unseen objects, despite being trained on object masks from a limited set of categories. Additionally, it can generalize to non-object dynamic concepts, such as waves crashing in the ocean, as demonstrated in our newly introduced benchmark for Referral Video Process Segmentation (Ref-VPS). Our experiments show that REM performs on par with state-of-the-art approaches on in-domain datasets, like Ref-DAVIS, while outperforming them by up to twelve points in terms of region similarity on out-of-domain data, leveraging the power of Internet-scale pre-training.
Lexicon3D: Probing Visual Foundation Models for Complex 3D Scene Understanding
Sep 05, 2024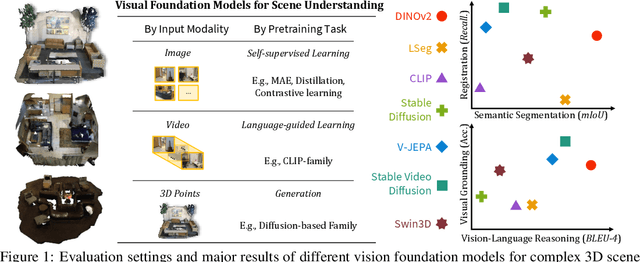
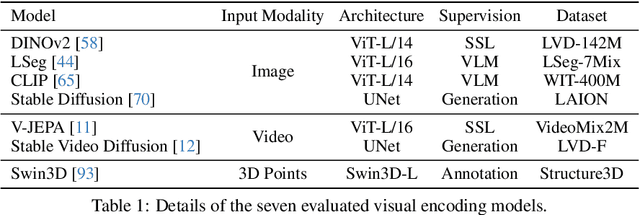
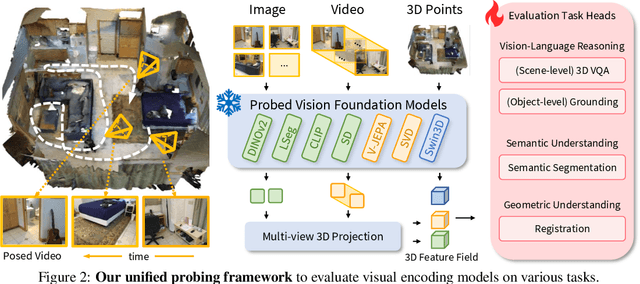
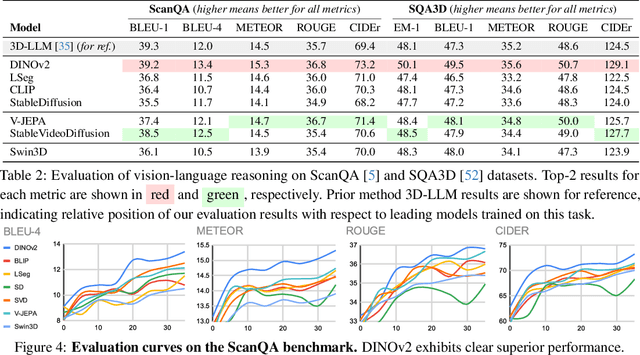
Complex 3D scene understanding has gained increasing attention, with scene encoding strategies playing a crucial role in this success. However, the optimal scene encoding strategies for various scenarios remain unclear, particularly compared to their image-based counterparts. To address this issue, we present a comprehensive study that probes various visual encoding models for 3D scene understanding, identifying the strengths and limitations of each model across different scenarios. Our evaluation spans seven vision foundation encoders, including image-based, video-based, and 3D foundation models. We evaluate these models in four tasks: Vision-Language Scene Reasoning, Visual Grounding, Segmentation, and Registration, each focusing on different aspects of scene understanding. Our evaluations yield key findings: DINOv2 demonstrates superior performance, video models excel in object-level tasks, diffusion models benefit geometric tasks, and language-pretrained models show unexpected limitations in language-related tasks. These insights challenge some conventional understandings, provide novel perspectives on leveraging visual foundation models, and highlight the need for more flexible encoder selection in future vision-language and scene-understanding tasks.
Separate-and-Enhance: Compositional Finetuning for Text2Image Diffusion Models
Dec 10, 2023



Despite recent significant strides achieved by diffusion-based Text-to-Image (T2I) models, current systems are still less capable of ensuring decent compositional generation aligned with text prompts, particularly for the multi-object generation. This work illuminates the fundamental reasons for such misalignment, pinpointing issues related to low attention activation scores and mask overlaps. While previous research efforts have individually tackled these issues, we assert that a holistic approach is paramount. Thus, we propose two novel objectives, the Separate loss and the Enhance loss, that reduce object mask overlaps and maximize attention scores, respectively. Our method diverges from conventional test-time-adaptation techniques, focusing on finetuning critical parameters, which enhances scalability and generalizability. Comprehensive evaluations demonstrate the superior performance of our model in terms of image realism, text-image alignment, and adaptability, notably outperforming prominent baselines. Ultimately, this research paves the way for T2I diffusion models with enhanced compositional capacities and broader applicability. The project webpage is available at https://zpbao.github.io/projects/SepEn/.
Multi-task View Synthesis with Neural Radiance Fields
Sep 29, 2023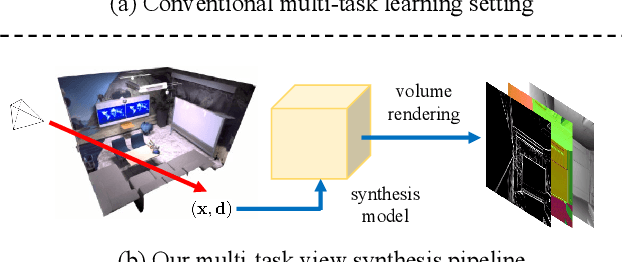
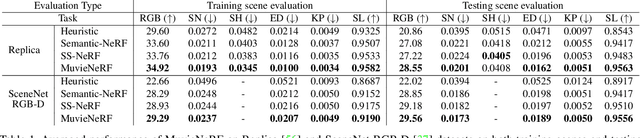
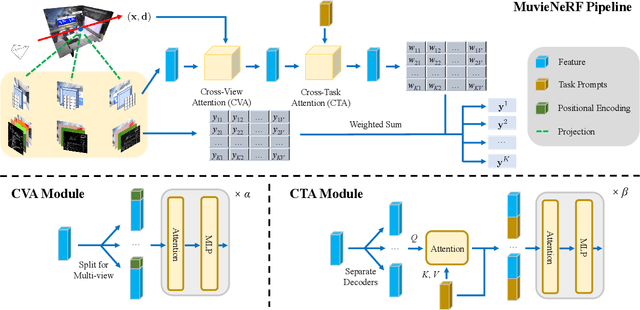
Multi-task visual learning is a critical aspect of computer vision. Current research, however, predominantly concentrates on the multi-task dense prediction setting, which overlooks the intrinsic 3D world and its multi-view consistent structures, and lacks the capability for versatile imagination. In response to these limitations, we present a novel problem setting -- multi-task view synthesis (MTVS), which reinterprets multi-task prediction as a set of novel-view synthesis tasks for multiple scene properties, including RGB. To tackle the MTVS problem, we propose MuvieNeRF, a framework that incorporates both multi-task and cross-view knowledge to simultaneously synthesize multiple scene properties. MuvieNeRF integrates two key modules, the Cross-Task Attention (CTA) and Cross-View Attention (CVA) modules, enabling the efficient use of information across multiple views and tasks. Extensive evaluation on both synthetic and realistic benchmarks demonstrates that MuvieNeRF is capable of simultaneously synthesizing different scene properties with promising visual quality, even outperforming conventional discriminative models in various settings. Notably, we show that MuvieNeRF exhibits universal applicability across a range of NeRF backbones. Our code is available at https://github.com/zsh2000/MuvieNeRF.
Flexible Techniques for Differentiable Rendering with 3D Gaussians
Aug 28, 2023
Fast, reliable shape reconstruction is an essential ingredient in many computer vision applications. Neural Radiance Fields demonstrated that photorealistic novel view synthesis is within reach, but was gated by performance requirements for fast reconstruction of real scenes and objects. Several recent approaches have built on alternative shape representations, in particular, 3D Gaussians. We develop extensions to these renderers, such as integrating differentiable optical flow, exporting watertight meshes and rendering per-ray normals. Additionally, we show how two of the recent methods are interoperable with each other. These reconstructions are quick, robust, and easily performed on GPU or CPU. For code and visual examples, see https://leonidk.github.io/fmb-plus
Optimizing Algorithms From Pairwise User Preferences
Aug 08, 2023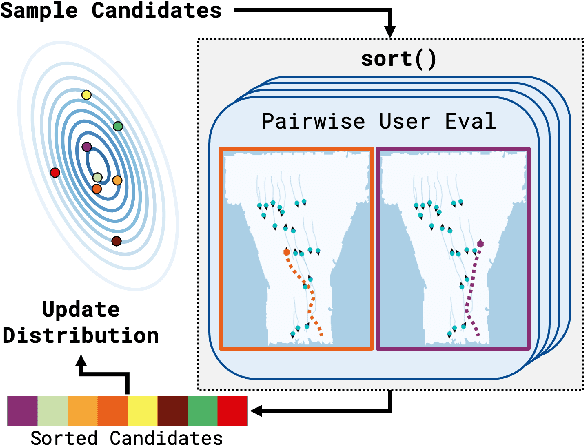

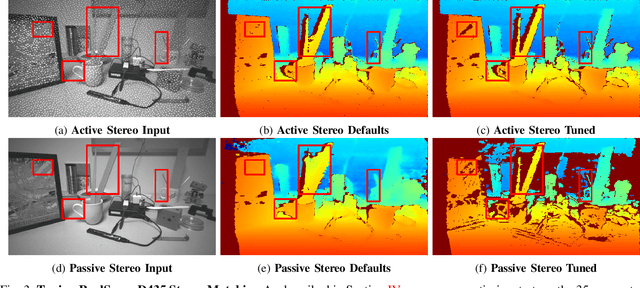
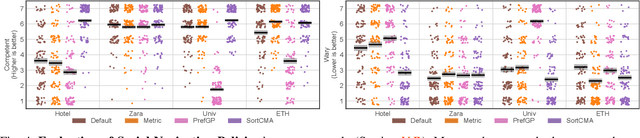
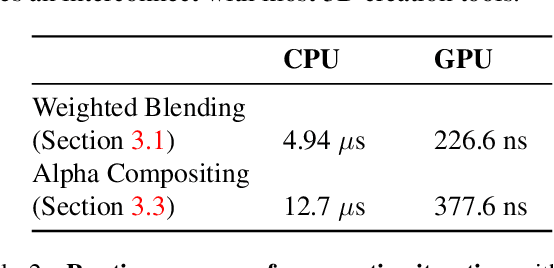
Typical black-box optimization approaches in robotics focus on learning from metric scores. However, that is not always possible, as not all developers have ground truth available. Learning appropriate robot behavior in human-centric contexts often requires querying users, who typically cannot provide precise metric scores. Existing approaches leverage human feedback in an attempt to model an implicit reward function; however, this reward may be difficult or impossible to effectively capture. In this work, we introduce SortCMA to optimize algorithm parameter configurations in high dimensions based on pairwise user preferences. SortCMA efficiently and robustly leverages user input to find parameter sets without directly modeling a reward. We apply this method to tuning a commercial depth sensor without ground truth, and to robot social navigation, which involves highly complex preferences over robot behavior. We show that our method succeeds in optimizing for the user's goals and perform a user study to evaluate social navigation results.
Thinking Like an Annotator: Generation of Dataset Labeling Instructions
Jun 24, 2023Large-scale datasets are essential to modern day deep learning. Advocates argue that understanding these methods requires dataset transparency (e.g. "dataset curation, motivation, composition, collection process, etc..."). However, almost no one has suggested the release of the detailed definitions and visual category examples provided to annotators - information critical to understanding the structure of the annotations present in each dataset. These labels are at the heart of public datasets, yet few datasets include the instructions that were used to generate them. We introduce a new task, Labeling Instruction Generation, to address missing publicly available labeling instructions. In Labeling Instruction Generation, we take a reasonably annotated dataset and: 1) generate a set of examples that are visually representative of each category in the dataset; 2) provide a text label that corresponds to each of the examples. We introduce a framework that requires no model training to solve this task and includes a newly created rapid retrieval system that leverages a large, pre-trained vision and language model. This framework acts as a proxy to human annotators that can help to both generate a final labeling instruction set and evaluate its quality. Our framework generates multiple diverse visual and text representations of dataset categories. The optimized instruction set outperforms our strongest baseline across 5 folds by 7.06 mAP for NuImages and 12.9 mAP for COCO.
Object Discovery from Motion-Guided Tokens
Mar 27, 2023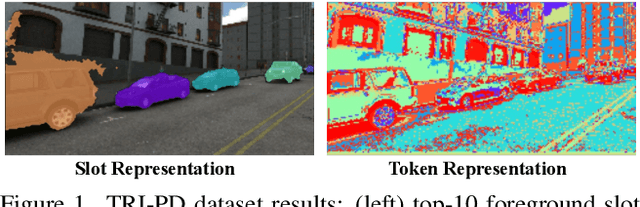
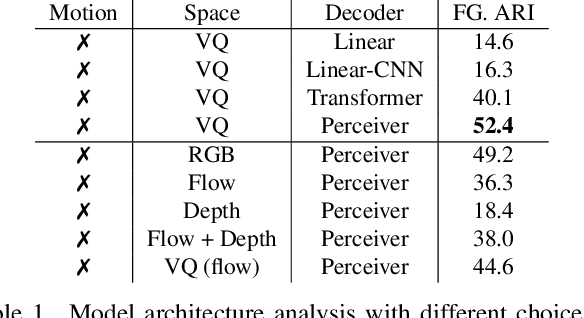
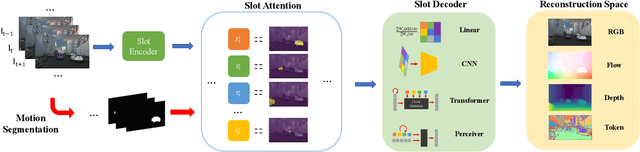
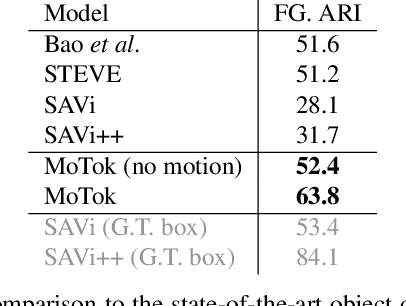
Object discovery -- separating objects from the background without manual labels -- is a fundamental open challenge in computer vision. Previous methods struggle to go beyond clustering of low-level cues, whether handcrafted (e.g., color, texture) or learned (e.g., from auto-encoders). In this work, we augment the auto-encoder representation learning framework with two key components: motion-guidance and mid-level feature tokenization. Although both have been separately investigated, we introduce a new transformer decoder showing that their benefits can compound thanks to motion-guided vector quantization. We show that our architecture effectively leverages the synergy between motion and tokenization, improving upon the state of the art on both synthetic and real datasets. Our approach enables the emergence of interpretable object-specific mid-level features, demonstrating the benefits of motion-guidance (no labeling) and quantization (interpretability, memory efficiency).