 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Techniques for Differentiable Rendering with 3D Gaussians
Aug 28, 2023
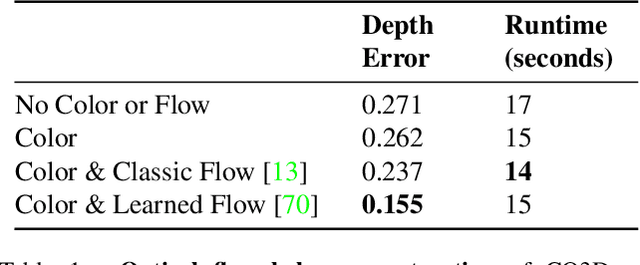
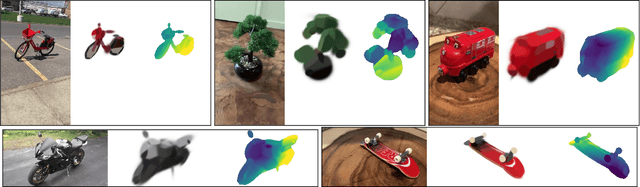
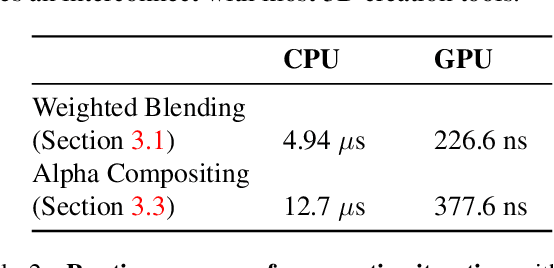
Fast, reliable shape reconstruction is an essential ingredient in many computer vision applications. Neural Radiance Fields demonstrated that photorealistic novel view synthesis is within reach, but was gated by performance requirements for fast reconstruction of real scenes and objects. Several recent approaches have built on alternative shape representations, in particular, 3D Gaussians. We develop extensions to these renderers, such as integrating differentiable optical flow, exporting watertight meshes and rendering per-ray normals. Additionally, we show how two of the recent methods are interoperable with each other. These reconstructions are quick, robust, and easily performed on GPU or CPU. For code and visual examples, see https://leonidk.github.io/fmb-plus
Optimizing Algorithms From Pairwise User Preferences
Aug 08, 2023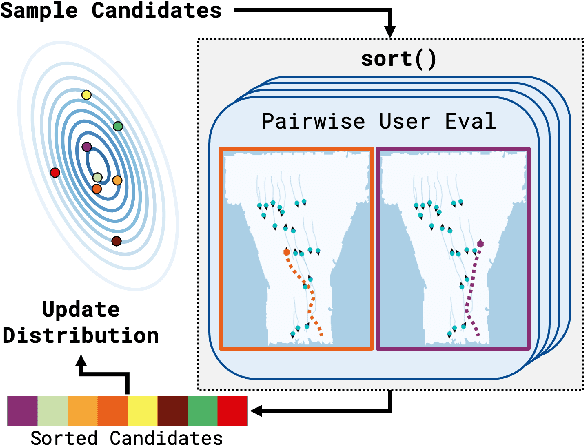

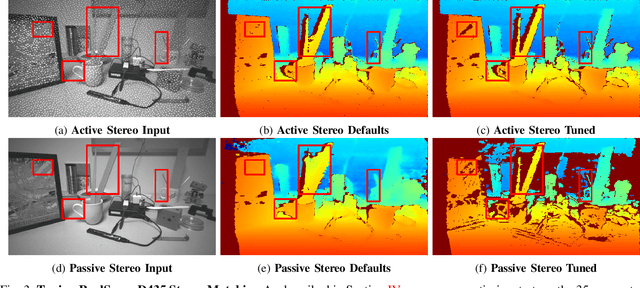
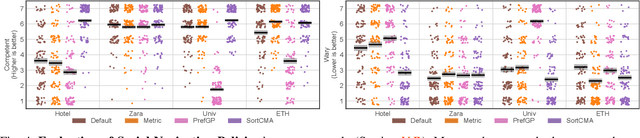
Typical black-box optimization approaches in robotics focus on learning from metric scores. However, that is not always possible, as not all developers have ground truth available. Learning appropriate robot behavior in human-centric contexts often requires querying users, who typically cannot provide precise metric scores. Existing approaches leverage human feedback in an attempt to model an implicit reward function; however, this reward may be difficult or impossible to effectively capture. In this work, we introduce SortCMA to optimize algorithm parameter configurations in high dimensions based on pairwise user preferences. SortCMA efficiently and robustly leverages user input to find parameter sets without directly modeling a reward. We apply this method to tuning a commercial depth sensor without ground truth, and to robot social navigation, which involves highly complex preferences over robot behavior. We show that our method succeeds in optimizing for the user's goals and perform a user study to evaluate social navigation results.
Discovering Multiple Algorithm Configurations
Mar 13, 2023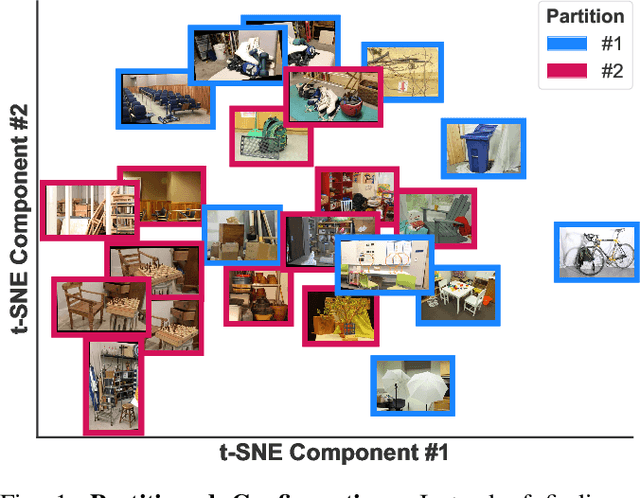
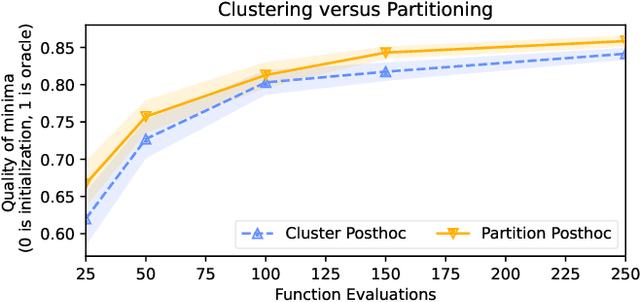
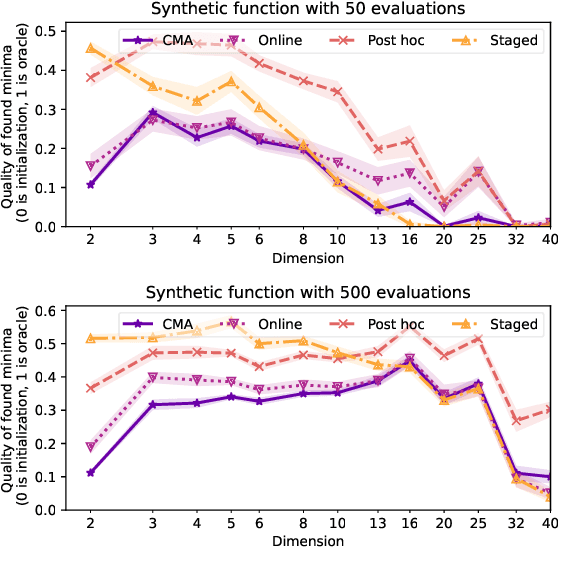
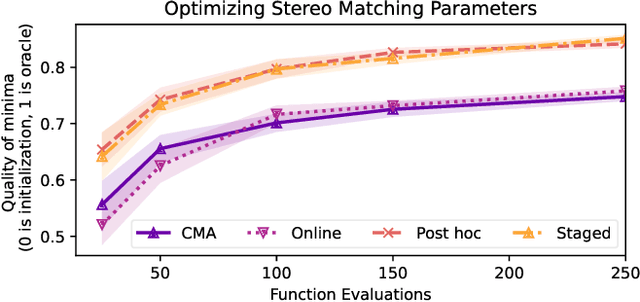
Many practitioners in robotics regularly depend on classic, hand-designed algorithms. Often the performance of these algorithms is tuned across a dataset of annotated examples which represent typical deployment conditions. Automatic tuning of these settings is traditionally known as algorithm configuration. In this work, we extend algorithm configuration to automatically discover multiple modes in the tuning dataset. Unlike prior work, these configuration modes represent multiple dataset instances and are detected automatically during the course of optimization. We propose three methods for mode discovery: a post hoc method, a multi-stage method, and an online algorithm using a multi-armed bandit. Our results characterize these methods on synthetic test functions and in multiple robotics application domains: stereoscopic depth estimation, differentiable rendering, motion planning, and visual odometry. We show the clear benefits of detecting multiple modes in algorithm configuration space.
Approximate Differentiable Rendering with Algebraic Surfaces
Jul 21, 2022
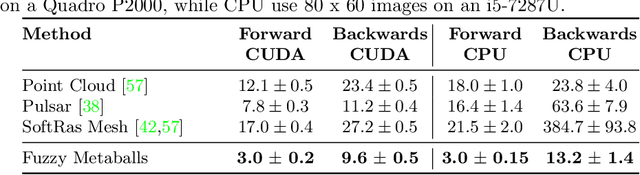
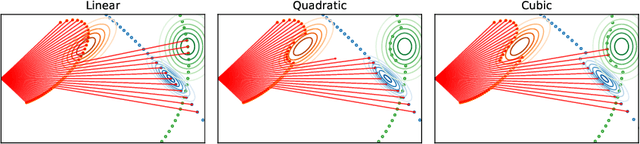
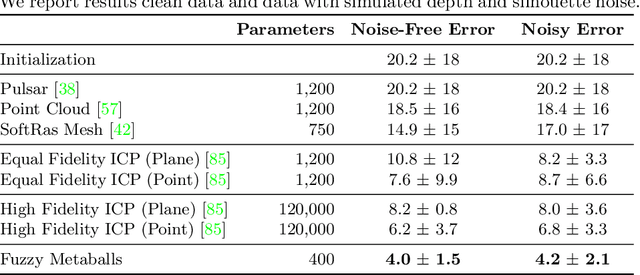
Differentiable renderers provide a direct mathematical link between an object's 3D representation and images of that object. In this work, we develop an approximate differentiable renderer for a compact, interpretable representation, which we call Fuzzy Metaballs. Our approximate renderer focuses on rendering shapes via depth maps and silhouettes. It sacrifices fidelity for utility, producing fast runtimes and high-quality gradient information that can be used to solve vision tasks. Compared to mesh-based differentiable renderers, our method has forward passes that are 5x faster and backwards passes that are 30x faster. The depth maps and silhouette images generated by our method are smooth and defined everywhere. In our evaluation of differentiable renderers for pose estimation, we show that our method is the only one comparable to classic techniques. In shape from silhouette, our method performs well using only gradient descent and a per-pixel loss, without any surrogate losses or regularization. These reconstructions work well even on natural video sequences with segmentation artifacts. Project page: https://leonidk.github.io/fuzzy-metaballs
Direct Fitting of Gaussian Mixture Models
Apr 11, 2019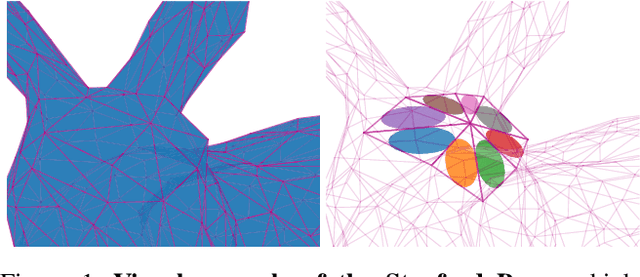
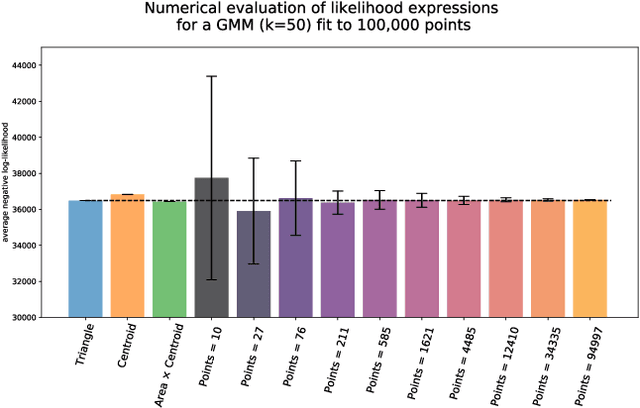
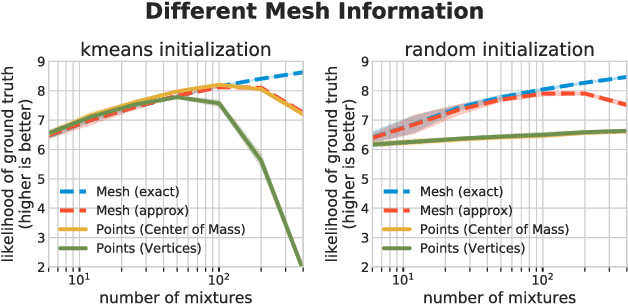
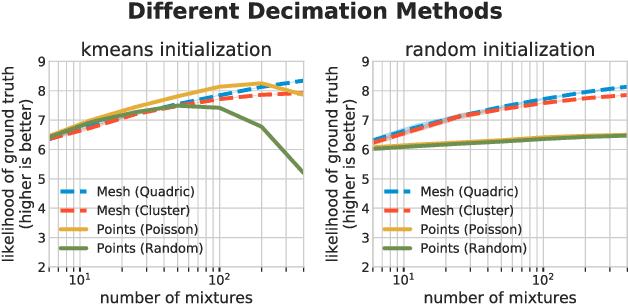
When fitting Gaussian Mixture Models to 3D geometry, the model is typically fit to point clouds, even when the shapes were obtained as 3D meshes. Here we present a formulation for fitting Gaussian Mixture Models (GMMs) directly to geometric objects, using the triangles of triangular mesh instead of using points sampled from its surface. We demonstrate that this modification enables fitting higher-quality GMMs under a wider range of initialization conditions. Additionally, models obtained from this fitting method are shown to produce an improvement in 3D registration for both meshes and RGB-D frames.
Intel RealSense Stereoscopic Depth Cameras
Oct 29, 2017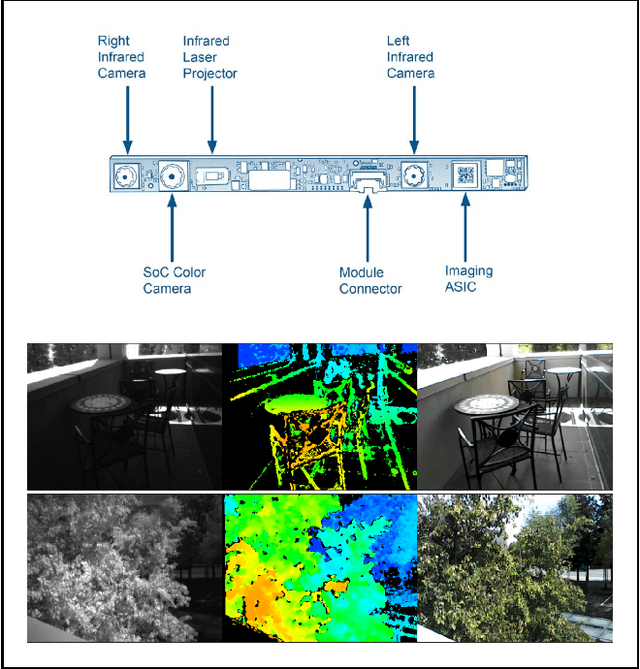

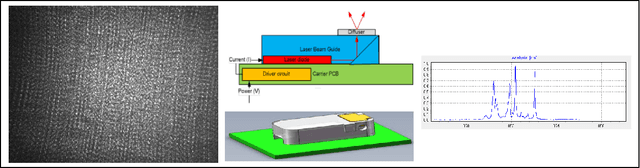
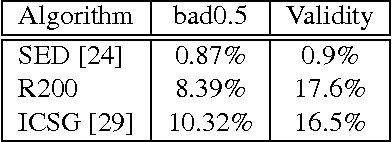
We present a comprehensive overview of the stereoscopic Intel RealSense RGBD imaging systems. We discuss these systems' mode-of-operation, functional behavior and include models of their expected performance, shortcomings, and limitations. We provide information about the systems' optical characteristics, their correlation algorithms, and how these properties can affect different applications, including 3D reconstruction and gesture recognition. Our discussion covers the Intel RealSense R200 and the Intel RealSense D400 (formally RS400).
Dynamics Based 3D Skeletal Hand Tracking
May 22, 2017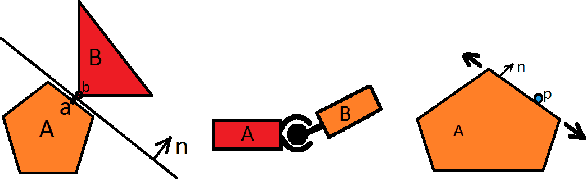
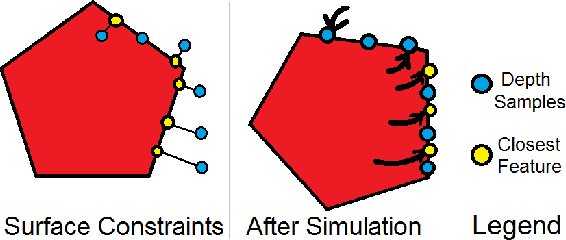
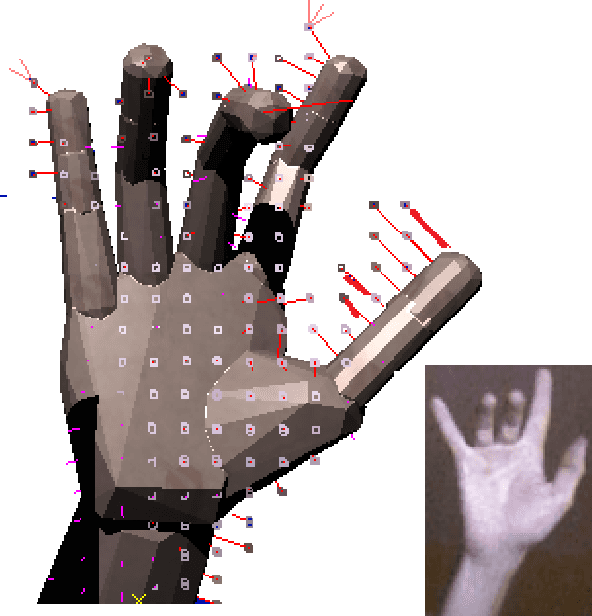
Tracking the full skeletal pose of the hands and fingers is a challenging problem that has a plethora of applications for user interaction. Existing techniques either require wearable hardware, add restrictions to user pose, or require significant computation resources. This research explores a new approach to tracking hands, or any articulated model, by using an augmented rigid body simulation. This allows us to phrase 3D object tracking as a linear complementarity problem with a well-defined solution. Based on a depth sensor's samples, the system generates constraints that limit motion orthogonal to the rigid body model's surface. These constraints, along with prior motion, collision/contact constraints, and joint mechanics, are resolved with a projected Gauss-Seidel solver. Due to camera noise properties and attachment errors, the numerous surface constraints are impulse capped to avoid overpowering mechanical constraints. To improve tracking accuracy, multiple simulations are spawned at each frame and fed a variety of heuristics, constraints and poses. A 3D error metric selects the best-fit simulation, helping the system handle challenging hand motions. Such an approach enables real-time, robust, and accurate 3D skeletal tracking of a user's hand on a variety of depth cameras, while only utilizing a single x86 CPU core for processing.