 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Multiple Algorithm Configurations
Paper and Code
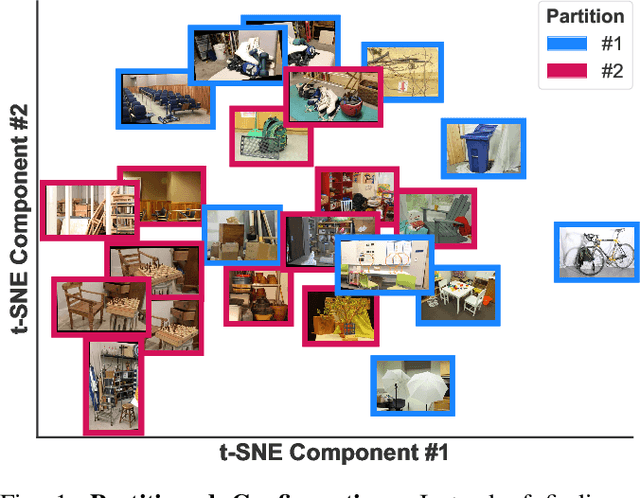
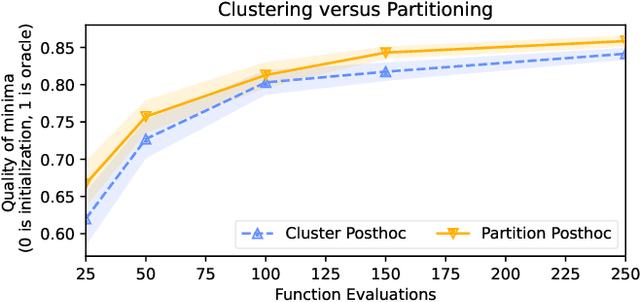
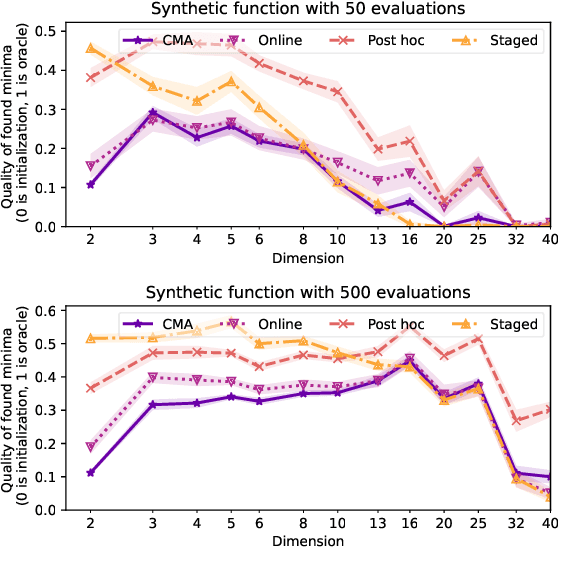
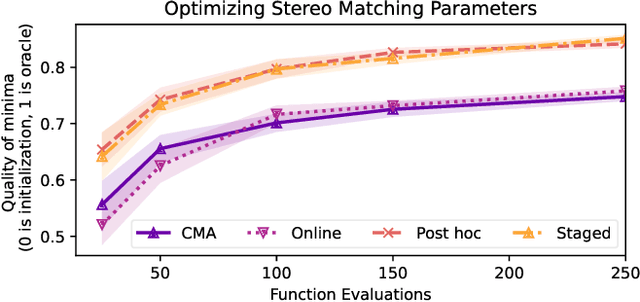
Many practitioners in robotics regularly depend on classic, hand-designed algorithms. Often the performance of these algorithms is tuned across a dataset of annotated examples which represent typical deployment conditions. Automatic tuning of these settings is traditionally known as algorithm configuration. In this work, we extend algorithm configuration to automatically discover multiple modes in the tuning dataset. Unlike prior work, these configuration modes represent multiple dataset instances and are detected automatically during the course of optimization. We propose three methods for mode discovery: a post hoc method, a multi-stage method, and an online algorithm using a multi-armed bandit. Our results characterize these methods on synthetic test functions and in multiple robotics application domains: stereoscopic depth estimation, differentiable rendering, motion planning, and visual odometry. We show the clear benefits of detecting multiple modes in algorithm configuration space.