 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards learning-based planning:The nuPlan benchmark for real-world autonomous driving
Mar 07, 2024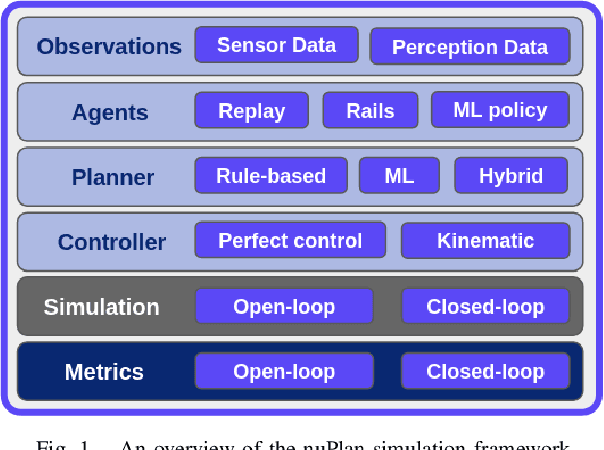
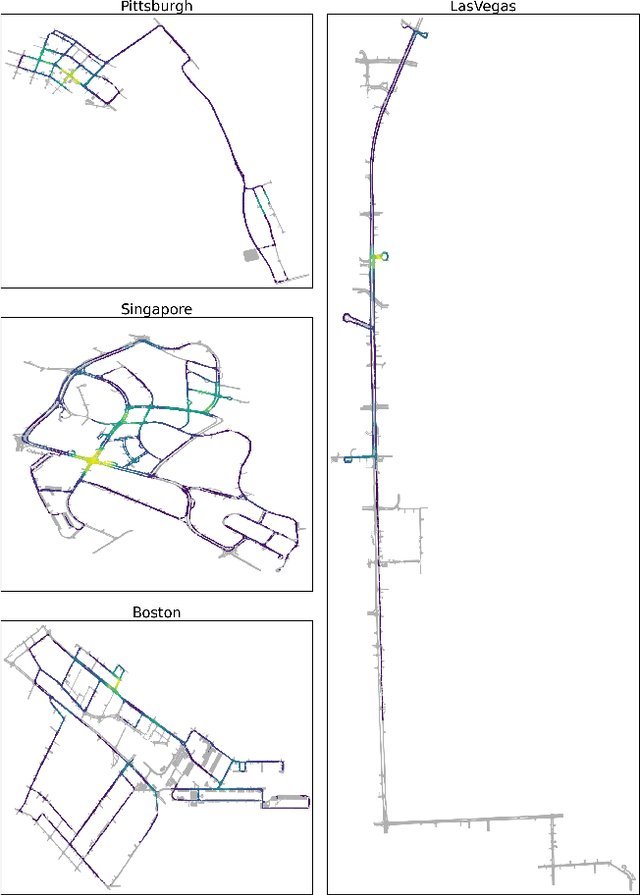
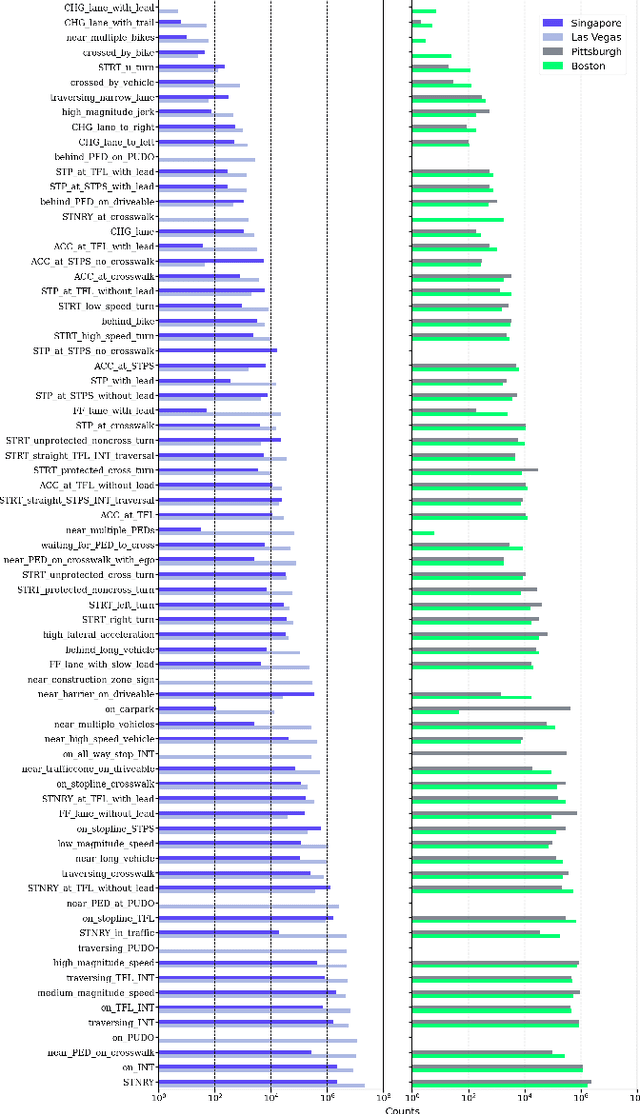
Machine Learning (ML) has replaced traditional handcrafted methods for perception and prediction in autonomous vehicles. Yet for the equally important planning task, the adoption of ML-based techniques is slow. We present nuPlan, the world's first real-world autonomous driving dataset, and benchmark. The benchmark is designed to test the ability of ML-based planners to handle diverse driving situations and to make safe and efficient decisions. To that end, we introduce a new large-scale dataset that consists of 1282 hours of diverse driving scenarios from 4 cities (Las Vegas, Boston, Pittsburgh, and Singapore) and includes high-quality auto-labeled object tracks and traffic light data. We exhaustively mine and taxonomize common and rare driving scenarios which are used during evaluation to get fine-grained insights into the performance and characteristics of a planner. Beyond the dataset, we provide a simulation and evaluation framework that enables a planner's actions to be simulated in closed-loop to account for interactions with other traffic participants. We present a detailed analysis of numerous baselines and investigate gaps between ML-based and traditional methods. Find the nuPlan dataset and code at nuplan.org.
Practical Reinforcement Learning For MPC: Learning from sparse objectives in under an hour on a real robot
Mar 06, 2020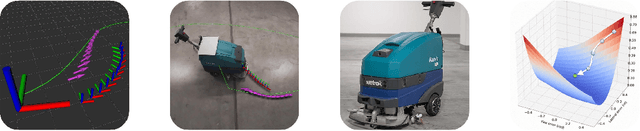
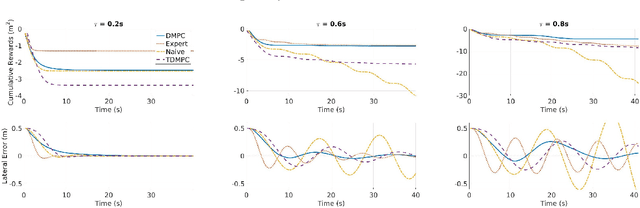

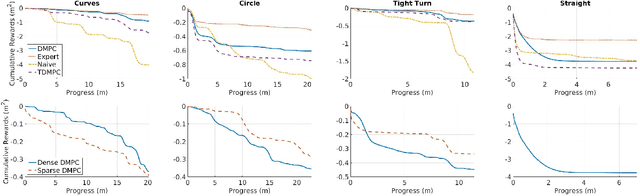
Model Predictive Control (MPC) is a powerful control technique that handles constraints, takes the system's dynamics into account, and optimizes for a given cost function. In practice, however, it often requires an expert to craft and tune this cost function and find trade-offs between different state penalties to satisfy simple high level objectives. In this paper, we use Reinforcement Learning and in particular value learning to approximate the value function given only high level objectives, which can be sparse and binary. Building upon previous works, we present improvements that allowed us to successfully deploy the method on a real world unmanned ground vehicle. Our experiments show that our method can learn the cost function from scratch and without human intervention, while reaching a performance level similar to that of an expert-tuned MPC. We perform a quantitative comparison of these methods with standard MPC approaches both in simulation and on the real robot.
AMZ Driverless: The Full Autonomous Racing System
May 13, 2019
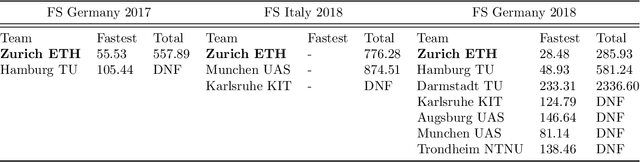
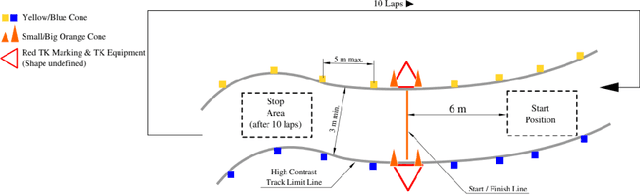
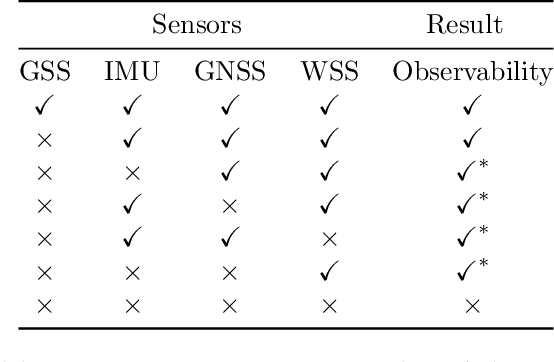
This paper presents the algorithms and system architecture of an autonomous racecar. The introduced vehicle is powered by a software stack designed for robustness, reliability, and extensibility. In order to autonomously race around a previously unknown track, the proposed solution combines state of the art techniques from different fields of robotics. Specifically, perception, estimation, and control are incorporated into one high-performance autonomous racecar. This complex robotic system, developed by AMZ Driverless and ETH Zurich, finished 1st overall at each competition we attended: Formula Student Germany 2017, Formula Student Italy 2018 and Formula Student Germany 2018. We discuss the findings and learnings from these competitions and present an experimental evaluation of each module of our solution.