 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Velocity Estimation For Autonomous Racing
Mar 15, 2020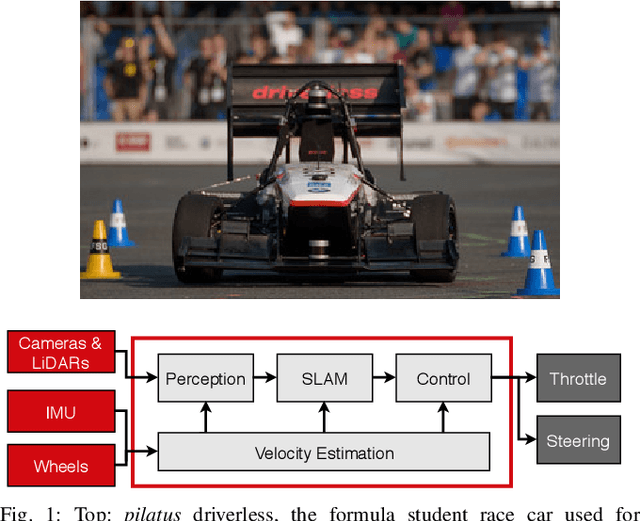
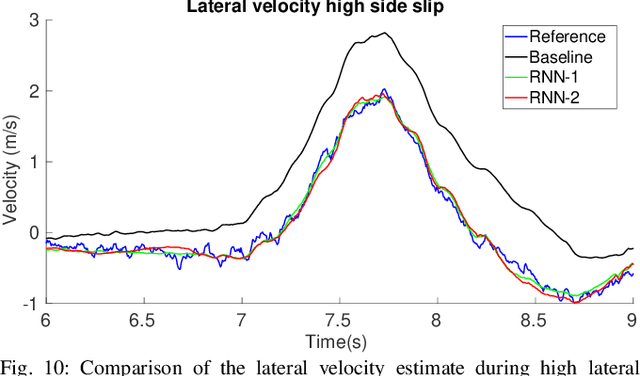
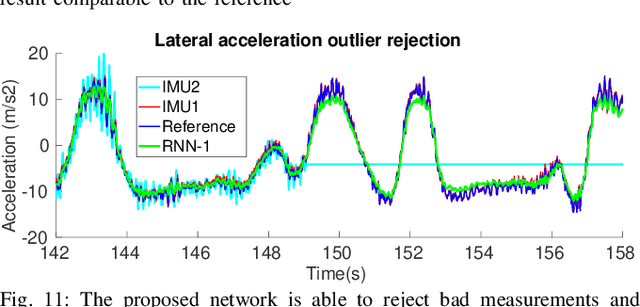
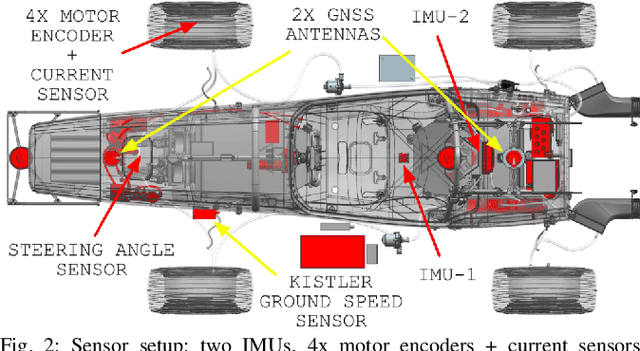
Velocity estimation plays a central role in driverless vehicles, but standard and affordable methods struggle to cope with extreme scenarios like aggressive maneuvers due to the presence of high sideslip. To solve this, autonomous race cars are usually equipped with expensive external velocity sensors. In this paper, we present an end-to-end recurrent neural network that takes available raw sensors as input (IMU, wheel odometry, and motor currents) and outputs velocity estimates. The results are compared to two state-of-the-art Kalman filters, which respectively include and exclude expensive velocity sensors. All methods have been extensively tested on a formula student driverless race car with very high sideslip (10{\deg} at the rear axle) and slip ratio (~20%), operating close to the limits of handling. The proposed network is able to estimate lateral velocity up to 15x better than the Kalman filter with the equivalent sensor input and matches (0.06 m/s RMSE) the Kalman filter with the expensive velocity sensor setup.
Practical Reinforcement Learning For MPC: Learning from sparse objectives in under an hour on a real robot
Mar 06, 2020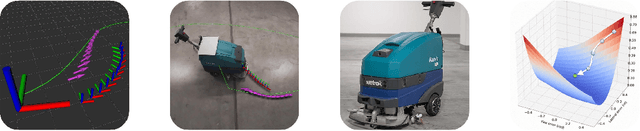
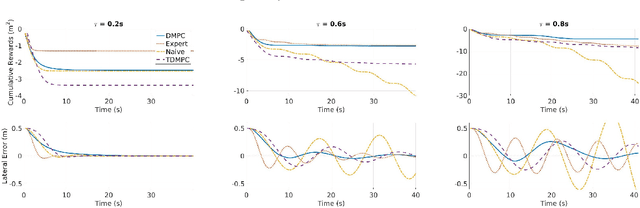

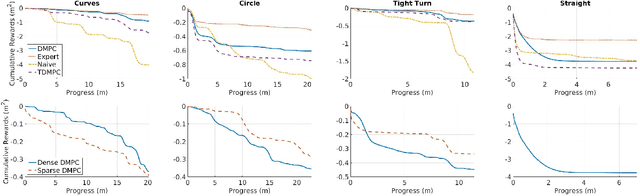
Model Predictive Control (MPC) is a powerful control technique that handles constraints, takes the system's dynamics into account, and optimizes for a given cost function. In practice, however, it often requires an expert to craft and tune this cost function and find trade-offs between different state penalties to satisfy simple high level objectives. In this paper, we use Reinforcement Learning and in particular value learning to approximate the value function given only high level objectives, which can be sparse and binary. Building upon previous works, we present improvements that allowed us to successfully deploy the method on a real world unmanned ground vehicle. Our experiments show that our method can learn the cost function from scratch and without human intervention, while reaching a performance level similar to that of an expert-tuned MPC. We perform a quantitative comparison of these methods with standard MPC approaches both in simulation and on the real robot.