 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Jul 12, 2021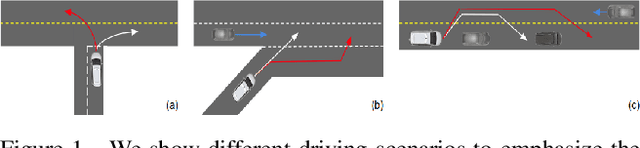
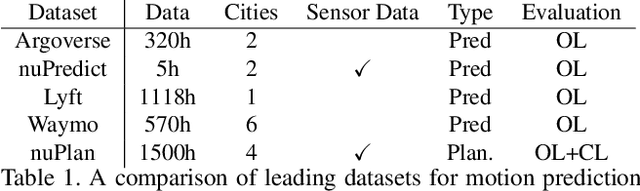
In this work, we propose the world's first closed-loop ML-based planning benchmark for autonomous driving. While there is a growing body of ML-based motion planners, the lack of established datasets and metrics has limited the progress in this area. Existing benchmarks for autonomous vehicle motion prediction have focused on short-term motion forecasting, rather than long-term planning. This has led previous works to use open-loop evaluation with L2-based metrics, which are not suitable for fairly evaluating long-term planning. Our benchmark overcomes these limitations by introducing a large-scale driving dataset, lightweight closed-loop simulator, and motion-planning-specific metrics. We provide a high-quality dataset with 1500h of human driving data from 4 cities across the US and Asia with widely varying traffic patterns (Boston, Pittsburgh, Las Vegas and Singapore). We will provide a closed-loop simulation framework with reactive agents and provide a large set of both general and scenario-specific planning metrics. We plan to release the dataset at NeurIPS 2021 and organize benchmark challenges starting in early 2022.
On Maximizing Lateral Clearance of an Autonomous Vehicle in Urban Environments
Sep 01, 2019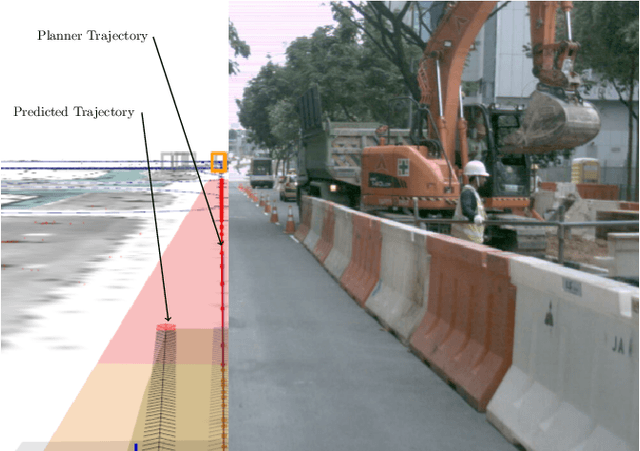
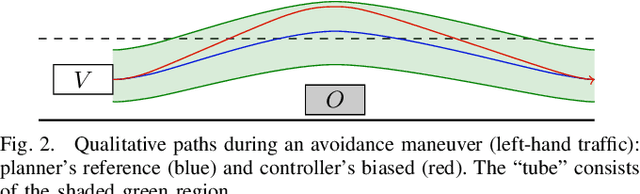

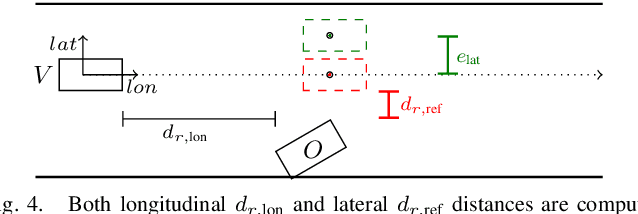
We consider the problem of maximizing distance to road agents for a self-driving car. To this extent, we employ a Model Predictive Control (MPC) approach for the steering tracking control of an Autonomous Vehicle (AV). Specifically, we first present a traditional MPC controller, which is then extended to encode the clearance maximization goal by manipulating its cost function and constraints. We provide insights on the additional information needed to achieve such goal, and how this modifies the structure of the original controller. Furthermore, a connection between commonly used safety metrics and clearance to road users is established. We implement the MPC controller using two off-the-shelf numerical solvers, assessing its computational feasibility. Finally, we show experimental results of the proposed approach on public roads in Boston and in Singapore.
AMZ Driverless: The Full Autonomous Racing System
May 13, 2019
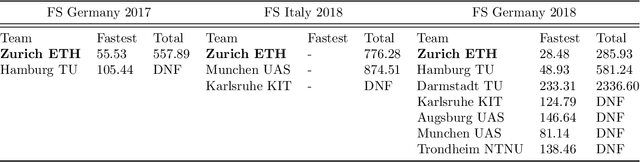
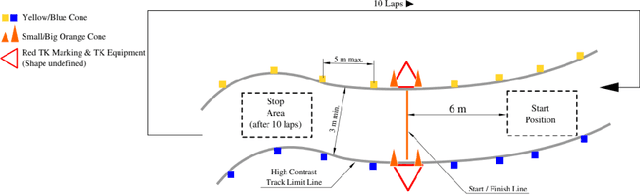
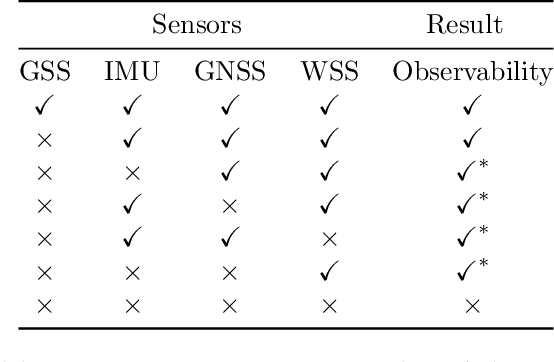
This paper presents the algorithms and system architecture of an autonomous racecar. The introduced vehicle is powered by a software stack designed for robustness, reliability, and extensibility. In order to autonomously race around a previously unknown track, the proposed solution combines state of the art techniques from different fields of robotics. Specifically, perception, estimation, and control are incorporated into one high-performance autonomous racecar. This complex robotic system, developed by AMZ Driverless and ETH Zurich, finished 1st overall at each competition we attended: Formula Student Germany 2017, Formula Student Italy 2018 and Formula Student Germany 2018. We discuss the findings and learnings from these competitions and present an experimental evaluation of each module of our solution.