 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving in Real Life with Inverse Reinforcement Learning
Jun 07, 2022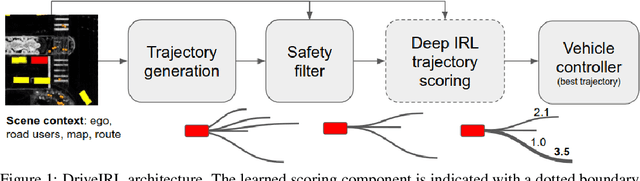

In this paper, we introduce the first learning-based planner to drive a car in dense, urban traffic using Inverse Reinforcement Learning (IRL). Our planner, DriveIRL, generates a diverse set of trajectory proposals, filters these trajectories with a lightweight and interpretable safety filter, and then uses a learned model to score each remaining trajectory. The best trajectory is then tracked by the low-level controller of our self-driving vehicle. We train our trajectory scoring model on a 500+ hour real-world dataset of expert driving demonstrations in Las Vegas within the maximum entropy IRL framework. DriveIRL's benefits include: a simple design due to only learning the trajectory scoring function, relatively interpretable features, and strong real-world performance. We validated DriveIRL on the Las Vegas Strip and demonstrated fully autonomous driving in heavy traffic, including scenarios involving cut-ins, abrupt braking by the lead vehicle, and hotel pickup/dropoff zones. Our dataset will be made public to help further research in this area.
Importance is in your attention: agent importance prediction for autonomous driving
Apr 19, 2022
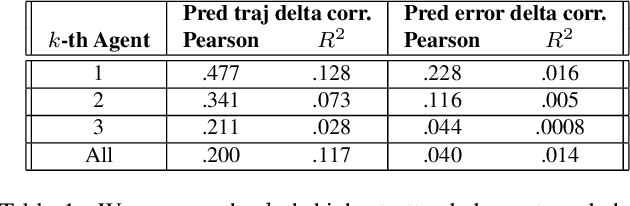
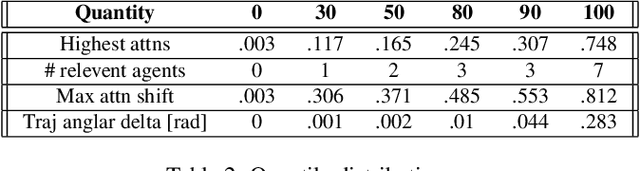
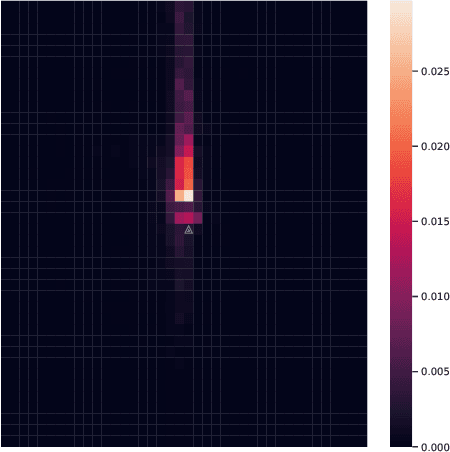
Trajectory prediction is an important task in autonomous driving. State-of-the-art trajectory prediction models often use attention mechanisms to model the interaction between agents. In this paper, we show that the attention information from such models can also be used to measure the importance of each agent with respect to the ego vehicle's future planned trajectory. Our experiment results on the nuPlans dataset show that our method can effectively find and rank surrounding agents by their impact on the ego's plan.
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Jul 12, 2021
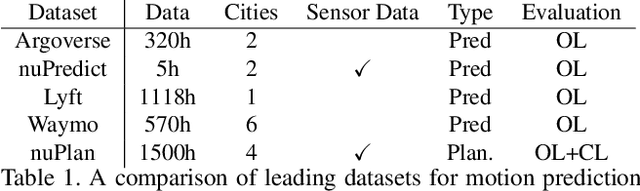
In this work, we propose the world's first closed-loop ML-based planning benchmark for autonomous driving. While there is a growing body of ML-based motion planners, the lack of established datasets and metrics has limited the progress in this area. Existing benchmarks for autonomous vehicle motion prediction have focused on short-term motion forecasting, rather than long-term planning. This has led previous works to use open-loop evaluation with L2-based metrics, which are not suitable for fairly evaluating long-term planning. Our benchmark overcomes these limitations by introducing a large-scale driving dataset, lightweight closed-loop simulator, and motion-planning-specific metrics. We provide a high-quality dataset with 1500h of human driving data from 4 cities across the US and Asia with widely varying traffic patterns (Boston, Pittsburgh, Las Vegas and Singapore). We will provide a closed-loop simulation framework with reactive agents and provide a large set of both general and scenario-specific planning metrics. We plan to release the dataset at NeurIPS 2021 and organize benchmark challenges starting in early 2022.
One Thousand and One Hours: Self-driving Motion Prediction Dataset
Jun 25, 2020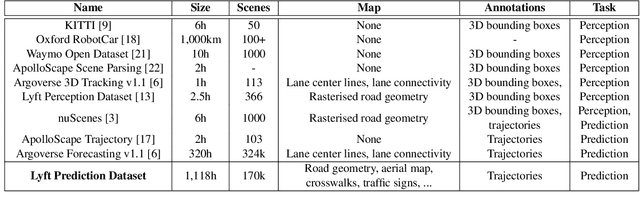
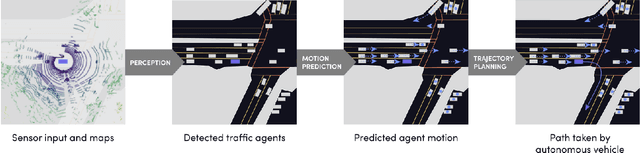
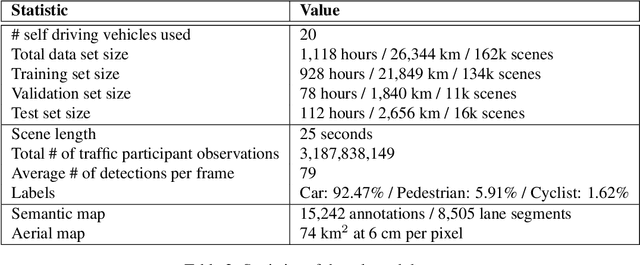
We present the largest self-driving dataset for motion prediction to date, with over 1,000 hours of data. This was collected by a fleet of 20 autonomous vehicles along a fixed route in Palo Alto, California over a four-month period. It consists of 170,000 scenes, where each scene is 25 seconds long and captures the perception output of the self-driving system, which encodes the precise positions and motions of nearby vehicles, cyclists, and pedestrians over time. On top of this, the dataset contains a high-definition semantic map with 15,242 labelled elements and a high-definition aerial view over the area. Together with the provided software kit, this collection forms the largest, most complete and detailed dataset to date for the development of self-driving, machine learning tasks such as motion forecasting, planning and simulation. The full dataset is available at http://level5.lyft.com/.