 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Composition Diffusion Model for Closed-loop Traffic Generation
Dec 23, 2024Simulation is critical for safety evaluation in autonomous driving, particularly in capturing complex interactive behaviors. However, generating realistic and controllable traffic scenarios in long-tail situations remains a significant challenge. Existing generative models suffer from the conflicting objective between user-defined controllability and realism constraints, which is amplified in safety-critical contexts. In this work, we introduce the Causal Compositional Diffusion Model (CCDiff), a structure-guided diffusion framework to address these challenges. We first formulate the learning of controllable and realistic closed-loop simulation as a constrained optimization problem. Then, CCDiff maximizes controllability while adhering to realism by automatically identifying and injecting causal structures directly into the diffusion process, providing structured guidance to enhance both realism and controllability. Through rigorous evaluations on benchmark datasets and in a closed-loop simulator, CCDiff demonstrates substantial gains over state-of-the-art approaches in generating realistic and user-preferred trajectories. Our results show CCDiff's effectiveness in extracting and leveraging causal structures, showing improved closed-loop performance based on key metrics such as collision rate, off-road rate, FDE, and comfort.
DriveGPT: Scaling Autoregressive Behavior Models for Driving
Dec 19, 2024



We present DriveGPT, a scalable behavior model for autonomous driving. We model driving as a sequential decision making task, and learn a transformer model to predict future agent states as tokens in an autoregressive fashion. We scale up our model parameters and training data by multiple orders of magnitude, enabling us to explore the scaling properties in terms of dataset size, model parameters, and compute. We evaluate DriveGPT across different scales in a planning task, through both quantitative metrics and qualitative examples including closed-loop driving in complex real-world scenarios. In a separate prediction task, DriveGPT outperforms a state-of-the-art baseline and exhibits improved performance by pretraining on a large-scale dataset, further validating the benefits of data scaling.
Explainable deep learning improves human mental models of self-driving cars
Nov 27, 2024Self-driving cars increasingly rely on deep neural networks to achieve human-like driving. However, the opacity of such black-box motion planners makes it challenging for the human behind the wheel to accurately anticipate when they will fail, with potentially catastrophic consequences. Here, we introduce concept-wrapper network (i.e., CW-Net), a method for explaining the behavior of black-box motion planners by grounding their reasoning in human-interpretable concepts. We deploy CW-Net on a real self-driving car and show that the resulting explanations refine the human driver's mental model of the car, allowing them to better predict its behavior and adjust their own behavior accordingly. Unlike previous work using toy domains or simulations, our study presents the first real-world demonstration of how to build authentic autonomous vehicles (AVs) that give interpretable, causally faithful explanations for their decisions, without sacrificing performance. We anticipate our method could be applied to other safety-critical systems with a human in the loop, such as autonomous drones and robotic surgeons. Overall, our study suggests a pathway to explainability for autonomous agents as a whole, which can help make them more transparent, their deployment safer, and their usage more ethical.
Driving in Real Life with Inverse Reinforcement Learning
Jun 07, 2022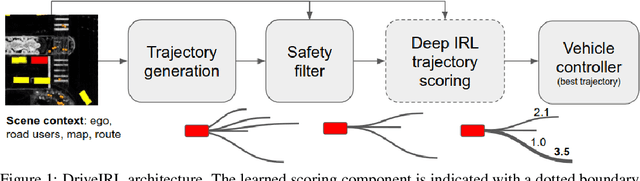

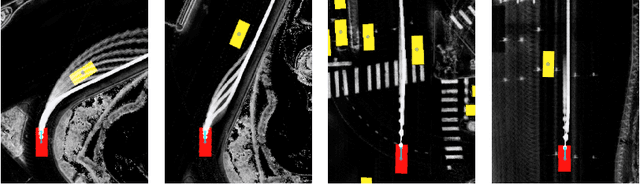
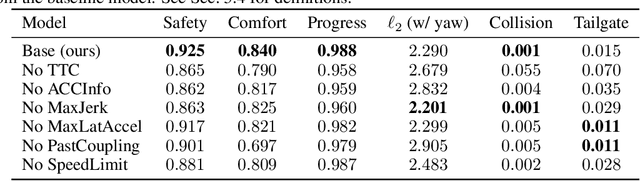
In this paper, we introduce the first learning-based planner to drive a car in dense, urban traffic using Inverse Reinforcement Learning (IRL). Our planner, DriveIRL, generates a diverse set of trajectory proposals, filters these trajectories with a lightweight and interpretable safety filter, and then uses a learned model to score each remaining trajectory. The best trajectory is then tracked by the low-level controller of our self-driving vehicle. We train our trajectory scoring model on a 500+ hour real-world dataset of expert driving demonstrations in Las Vegas within the maximum entropy IRL framework. DriveIRL's benefits include: a simple design due to only learning the trajectory scoring function, relatively interpretable features, and strong real-world performance. We validated DriveIRL on the Las Vegas Strip and demonstrated fully autonomous driving in heavy traffic, including scenarios involving cut-ins, abrupt braking by the lead vehicle, and hotel pickup/dropoff zones. Our dataset will be made public to help further research in this area.
Counter-example Guided Learning of Bounds on Environment Behavior
Feb 06, 2020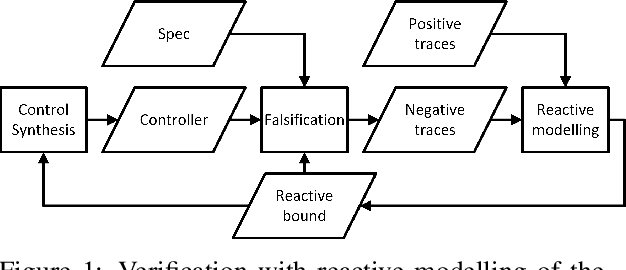
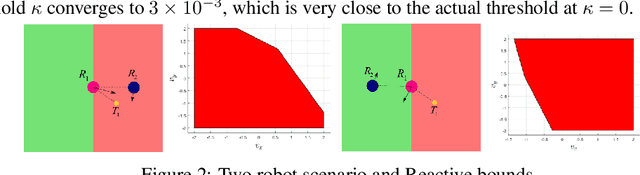
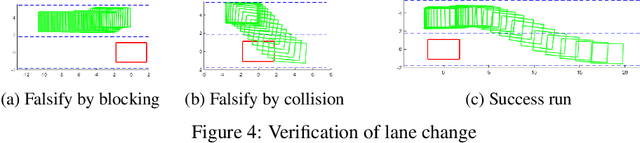
There is a growing interest in building autonomous systems that interact with complex environments. The difficulty associated with obtaining an accurate model for such environments poses a challenge to the task of assessing and guaranteeing the system's performance. We present a data-driven solution that allows for a system to be evaluated for specification conformance without an accurate model of the environment. Our approach involves learning a conservative reactive bound of the environment's behavior using data and specification of the system's desired behavior. First, the approach begins by learning a conservative reactive bound on the environment's actions that captures its possible behaviors with high probability. This bound is then used to assist verification, and if the verification fails under this bound, the algorithm returns counter-examples to show how failure occurs and then uses these to refine the bound. We demonstrate the applicability of the approach through two case-studies: i) verifying controllers for a toy multi-robot system, and ii) verifying an instance of human-robot interaction during a lane-change maneuver given real-world human driving data.
CoverNet: Multimodal Behavior Prediction using Trajectory Sets
Nov 23, 2019



We present CoverNet, a new method for multimodal, probabilistic trajectory prediction in urban driving scenarios. Previous work has employed a variety of methods, including multimodal regression, occupancy maps, and 1-step stochastic policies. We instead frame the trajectory prediction problem as classification over a diverse set of trajectories. The size of this set remains manageable, due to the fact that there are a limited number of distinct actions that can be taken over a reasonable prediction horizon. We structure the trajectory set to a) ensure a desired level of coverage of the state space, and b) eliminate physically impossible trajectories. By dynamically generating trajectory sets based on the agent's current state, we can further improve the efficiency of our method. We demonstrate our approach on public, real-world self-driving datasets, and show that it outperforms state-of-the-art methods.