 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Data Mining with Longtail-Guided Diffusion
Feb 04, 2025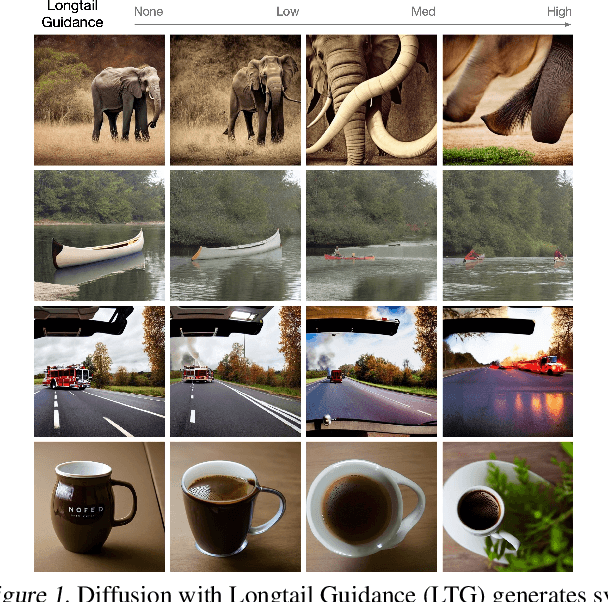
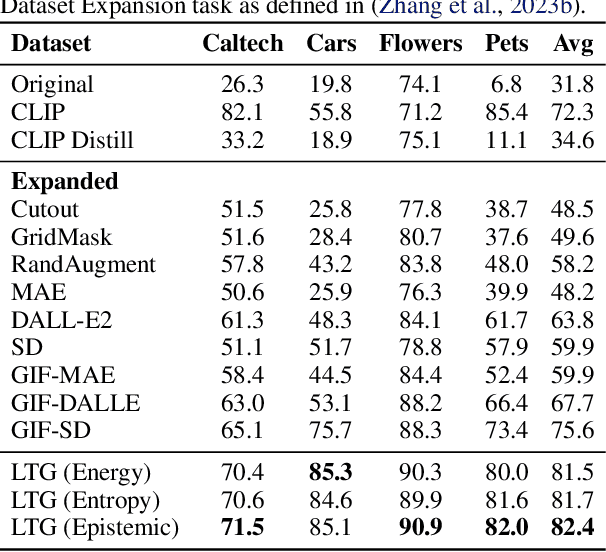
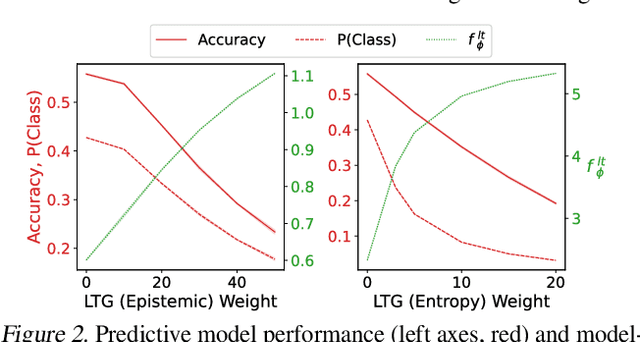
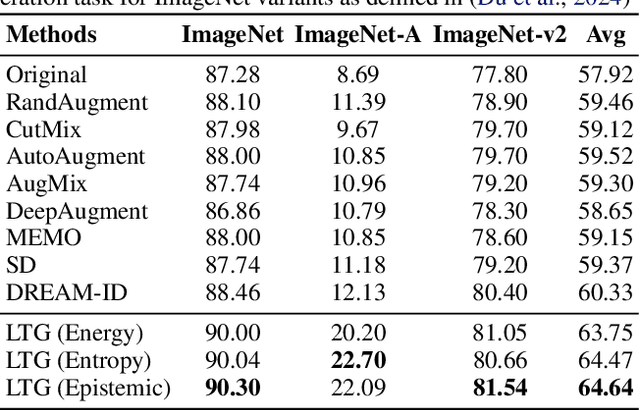
It is difficult to anticipate the myriad challenges that a predictive model will encounter once deployed. Common practice entails a reactive, cyclical approach: model deployment, data mining, and retraining. We instead develop a proactive longtail discovery process by imagining additional data during training. In particular, we develop general model-based longtail signals, including a differentiable, single forward pass formulation of epistemic uncertainty that does not impact model parameters or predictive performance but can flag rare or hard inputs. We leverage these signals as guidance to generate additional training data from a latent diffusion model in a process we call Longtail Guidance (LTG). Crucially, we can perform LTG without retraining the diffusion model or the predictive model, and we do not need to expose the predictive model to intermediate diffusion states. Data generated by LTG exhibit semantically meaningful variation, yield significant generalization improvements on image classification benchmarks, and can be analyzed to proactively discover, explain, and address conceptual gaps in a predictive model.
Causal Composition Diffusion Model for Closed-loop Traffic Generation
Dec 23, 2024Simulation is critical for safety evaluation in autonomous driving, particularly in capturing complex interactive behaviors. However, generating realistic and controllable traffic scenarios in long-tail situations remains a significant challenge. Existing generative models suffer from the conflicting objective between user-defined controllability and realism constraints, which is amplified in safety-critical contexts. In this work, we introduce the Causal Compositional Diffusion Model (CCDiff), a structure-guided diffusion framework to address these challenges. We first formulate the learning of controllable and realistic closed-loop simulation as a constrained optimization problem. Then, CCDiff maximizes controllability while adhering to realism by automatically identifying and injecting causal structures directly into the diffusion process, providing structured guidance to enhance both realism and controllability. Through rigorous evaluations on benchmark datasets and in a closed-loop simulator, CCDiff demonstrates substantial gains over state-of-the-art approaches in generating realistic and user-preferred trajectories. Our results show CCDiff's effectiveness in extracting and leveraging causal structures, showing improved closed-loop performance based on key metrics such as collision rate, off-road rate, FDE, and comfort.
DriveGPT: Scaling Autoregressive Behavior Models for Driving
Dec 19, 2024



We present DriveGPT, a scalable behavior model for autonomous driving. We model driving as a sequential decision making task, and learn a transformer model to predict future agent states as tokens in an autoregressive fashion. We scale up our model parameters and training data by multiple orders of magnitude, enabling us to explore the scaling properties in terms of dataset size, model parameters, and compute. We evaluate DriveGPT across different scales in a planning task, through both quantitative metrics and qualitative examples including closed-loop driving in complex real-world scenarios. In a separate prediction task, DriveGPT outperforms a state-of-the-art baseline and exhibits improved performance by pretraining on a large-scale dataset, further validating the benefits of data scaling.
Efficient Data Association and Uncertainty Quantification for Multi-Object Tracking
Nov 13, 2020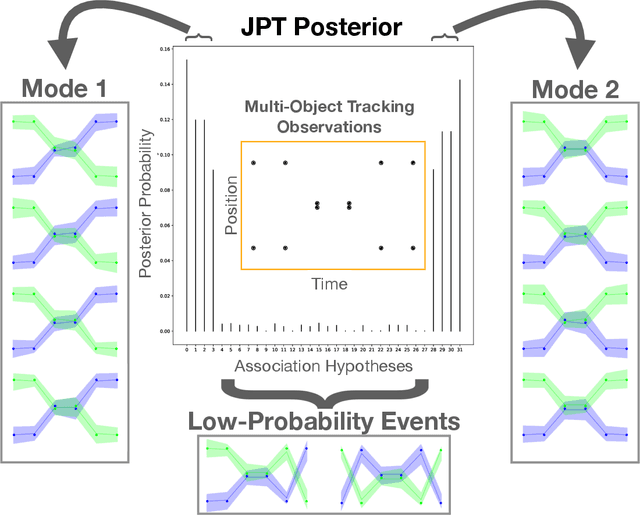

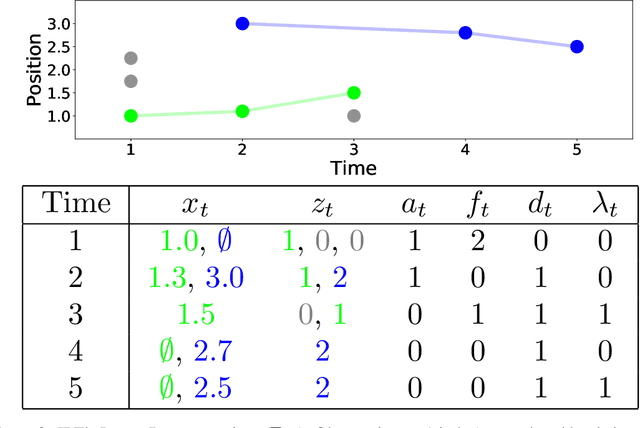
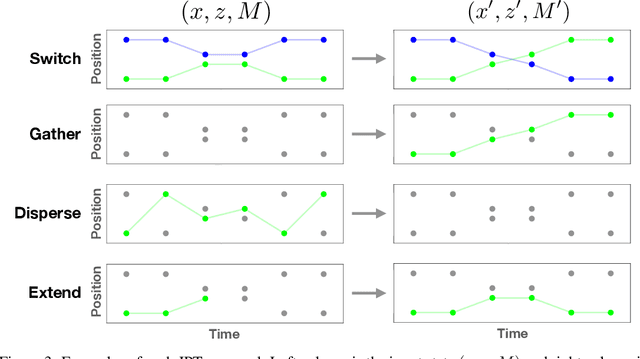
Robust data association is critical for analysis of long-term motion trajectories in complex scenes. In its absence, trajectory precision suffers due to periods of kinematic ambiguity degrading the quality of follow-on analysis. Common optimization-based approaches often neglect uncertainty quantification arising from these events. Consequently, we propose the Joint Posterior Tracker (JPT), a Bayesian multi-object tracking algorithm that robustly reasons over the posterior of associations and trajectories. Novel, permutation-based proposals are crafted for exploration of posterior modes that correspond to plausible association hypotheses. JPT exhibits more accurate uncertainty representation of data associations with superior performance on standard metrics when compared to existing baselines. We also show the utility of JPT applied to automatic scheduling of user-in-the-loop annotations for improved trajectory quality.