 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Data Association and Uncertainty Quantification for Multi-Object Tracking
Nov 13, 2020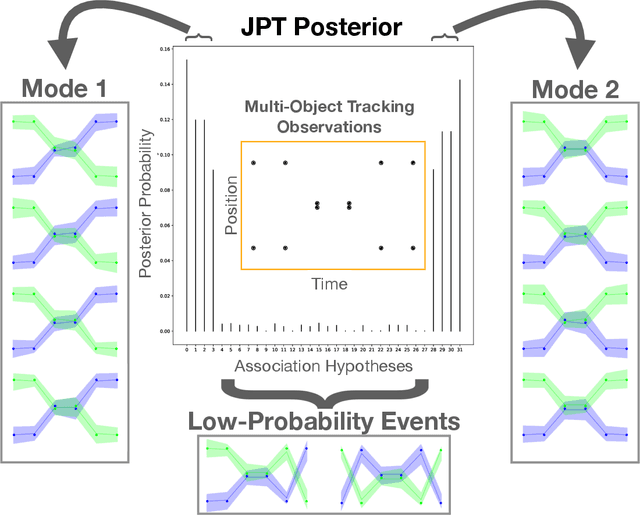

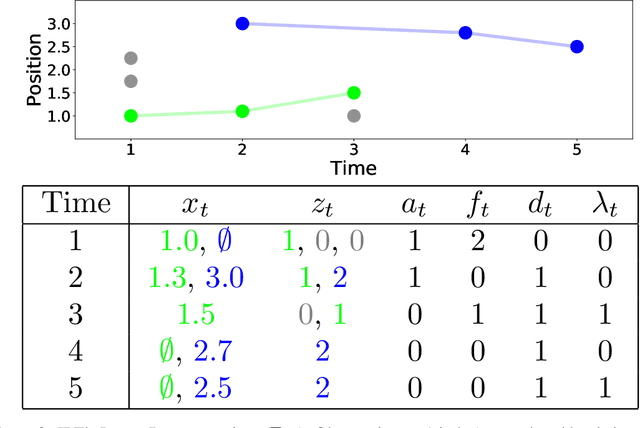
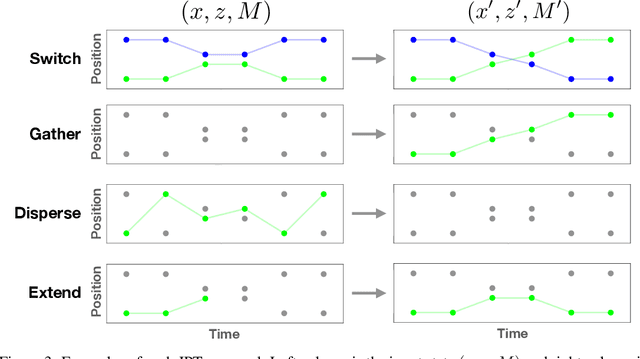
Robust data association is critical for analysis of long-term motion trajectories in complex scenes. In its absence, trajectory precision suffers due to periods of kinematic ambiguity degrading the quality of follow-on analysis. Common optimization-based approaches often neglect uncertainty quantification arising from these events. Consequently, we propose the Joint Posterior Tracker (JPT), a Bayesian multi-object tracking algorithm that robustly reasons over the posterior of associations and trajectories. Novel, permutation-based proposals are crafted for exploration of posterior modes that correspond to plausible association hypotheses. JPT exhibits more accurate uncertainty representation of data associations with superior performance on standard metrics when compared to existing baselines. We also show the utility of JPT applied to automatic scheduling of user-in-the-loop annotations for improved trajectory quality.
Bayesian Nonparametric Modeling of Driver Behavior using HDP Split-Merge Sampling Algorithm
Jan 27, 2018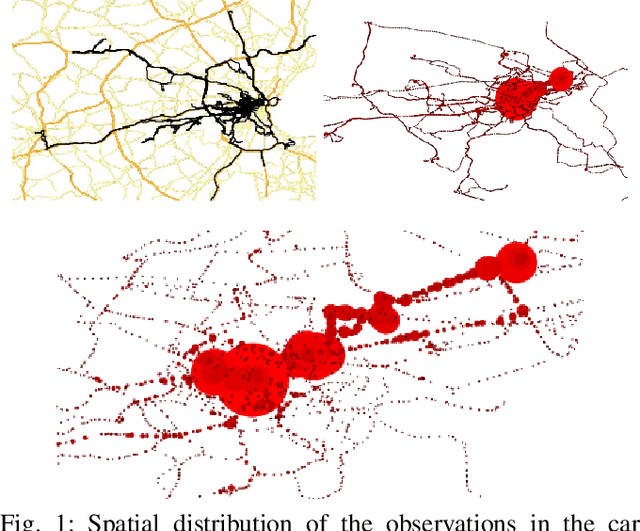
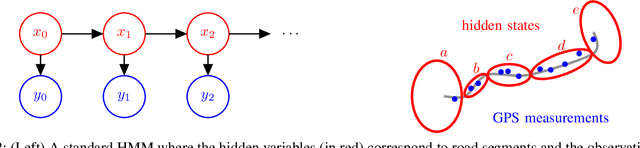
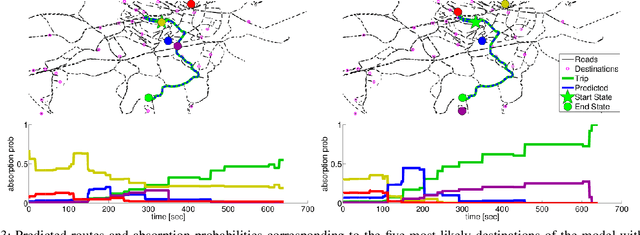
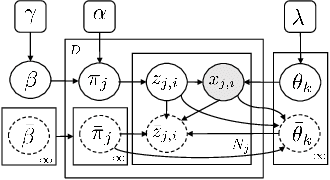
Modern vehicles are equipped with increasingly complex sensors. These sensors generate large volumes of data that provide opportunities for modeling and analysis. Here, we are interested in exploiting this data to learn aspects of behaviors and the road network associated with individual drivers. Our dataset is collected on a standard vehicle used to commute to work and for personal trips. A Hidden Markov Model (HMM) trained on the GPS position and orientation data is utilized to compress the large amount of position information into a small amount of road segment states. Each state has a set of observations, i.e. car signals, associated with it that are quantized and modeled as draws from a Hierarchical Dirichlet Process (HDP). The inference for the topic distributions is carried out using HDP split-merge sampling algorithm. The topic distributions over joint quantized car signals characterize the driving situation in the respective road state. In a novel manner, we demonstrate how the sparsity of the personal road network of a driver in conjunction with a hierarchical topic model allows data driven predictions about destinations as well as likely road conditions.