 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Data Mining with Longtail-Guided Diffusion
Feb 04, 2025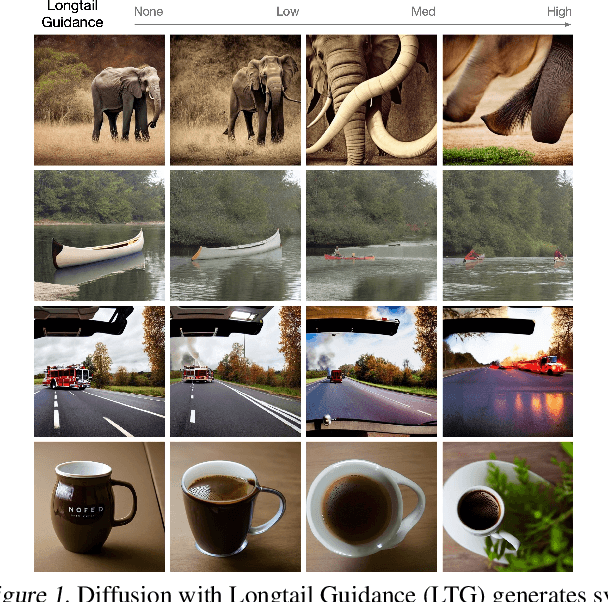
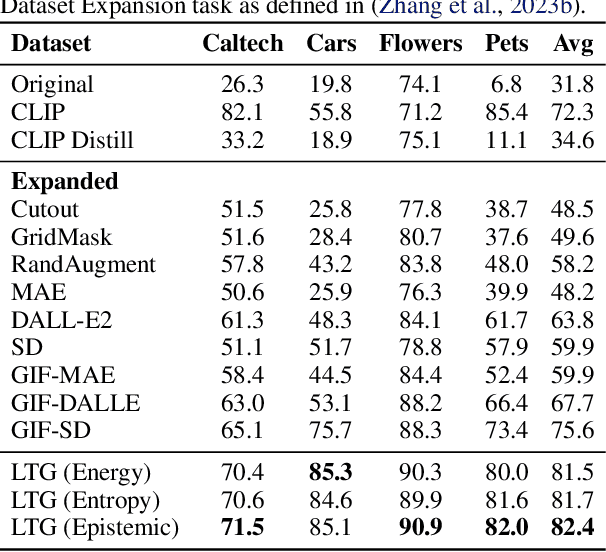
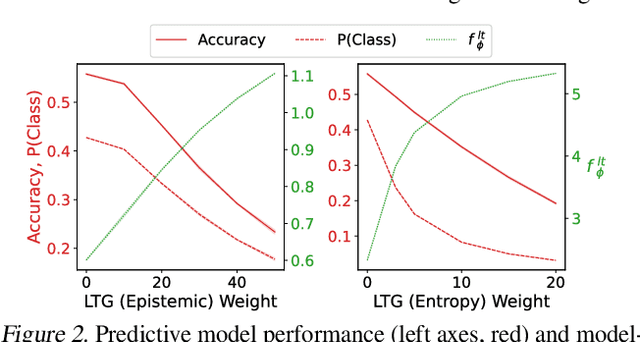
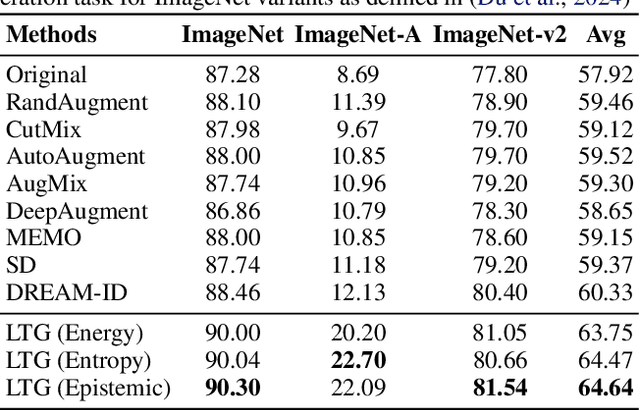
It is difficult to anticipate the myriad challenges that a predictive model will encounter once deployed. Common practice entails a reactive, cyclical approach: model deployment, data mining, and retraining. We instead develop a proactive longtail discovery process by imagining additional data during training. In particular, we develop general model-based longtail signals, including a differentiable, single forward pass formulation of epistemic uncertainty that does not impact model parameters or predictive performance but can flag rare or hard inputs. We leverage these signals as guidance to generate additional training data from a latent diffusion model in a process we call Longtail Guidance (LTG). Crucially, we can perform LTG without retraining the diffusion model or the predictive model, and we do not need to expose the predictive model to intermediate diffusion states. Data generated by LTG exhibit semantically meaningful variation, yield significant generalization improvements on image classification benchmarks, and can be analyzed to proactively discover, explain, and address conceptual gaps in a predictive model.
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Jul 12, 2021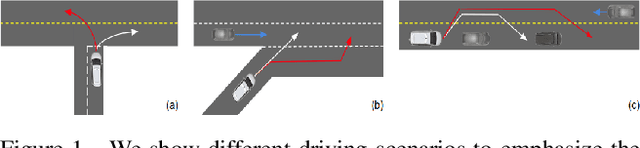
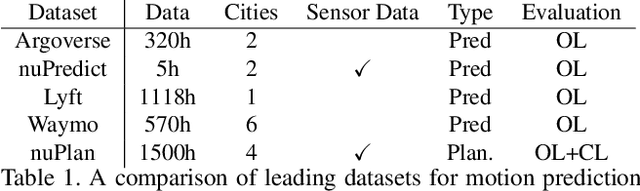
In this work, we propose the world's first closed-loop ML-based planning benchmark for autonomous driving. While there is a growing body of ML-based motion planners, the lack of established datasets and metrics has limited the progress in this area. Existing benchmarks for autonomous vehicle motion prediction have focused on short-term motion forecasting, rather than long-term planning. This has led previous works to use open-loop evaluation with L2-based metrics, which are not suitable for fairly evaluating long-term planning. Our benchmark overcomes these limitations by introducing a large-scale driving dataset, lightweight closed-loop simulator, and motion-planning-specific metrics. We provide a high-quality dataset with 1500h of human driving data from 4 cities across the US and Asia with widely varying traffic patterns (Boston, Pittsburgh, Las Vegas and Singapore). We will provide a closed-loop simulation framework with reactive agents and provide a large set of both general and scenario-specific planning metrics. We plan to release the dataset at NeurIPS 2021 and organize benchmark challenges starting in early 2022.