 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAAD: A Model and Dataset for "Attended Awareness" in Driving
Oct 16, 2021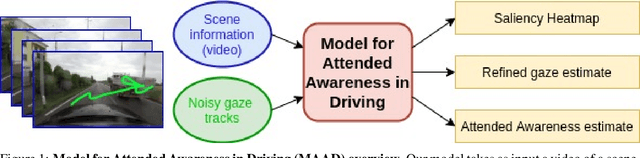

We propose a computational model to estimate a person's attended awareness of their environment. We define attended awareness to be those parts of a potentially dynamic scene which a person has attended to in recent history and which they are still likely to be physically aware of. Our model takes as input scene information in the form of a video and noisy gaze estimates, and outputs visual saliency, a refined gaze estimate, and an estimate of the person's attended awareness. In order to test our model, we capture a new dataset with a high-precision gaze tracker including 24.5 hours of gaze sequences from 23 subjects attending to videos of driving scenes. The dataset also contains third-party annotations of the subjects' attended awareness based on observations of their scan path. Our results show that our model is able to reasonably estimate attended awareness in a controlled setting, and in the future could potentially be extended to real egocentric driving data to help enable more effective ahead-of-time warnings in safety systems and thereby augment driver performance. We also demonstrate our model's effectiveness on the tasks of saliency, gaze calibration, and denoising, using both our dataset and an existing saliency dataset. We make our model and dataset available at https://github.com/ToyotaResearchInstitute/att-aware/.
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Jul 12, 2021
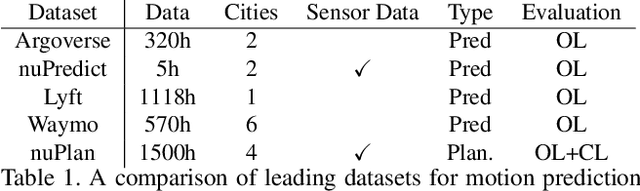
In this work, we propose the world's first closed-loop ML-based planning benchmark for autonomous driving. While there is a growing body of ML-based motion planners, the lack of established datasets and metrics has limited the progress in this area. Existing benchmarks for autonomous vehicle motion prediction have focused on short-term motion forecasting, rather than long-term planning. This has led previous works to use open-loop evaluation with L2-based metrics, which are not suitable for fairly evaluating long-term planning. Our benchmark overcomes these limitations by introducing a large-scale driving dataset, lightweight closed-loop simulator, and motion-planning-specific metrics. We provide a high-quality dataset with 1500h of human driving data from 4 cities across the US and Asia with widely varying traffic patterns (Boston, Pittsburgh, Las Vegas and Singapore). We will provide a closed-loop simulation framework with reactive agents and provide a large set of both general and scenario-specific planning metrics. We plan to release the dataset at NeurIPS 2021 and organize benchmark challenges starting in early 2022.
CARPAL: Confidence-Aware Intent Recognition for Parallel Autonomy
Mar 18, 2020
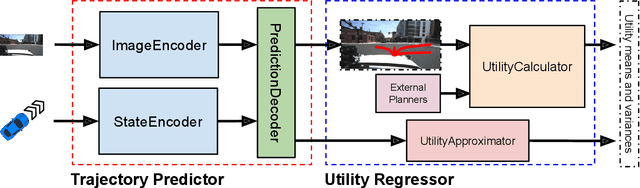
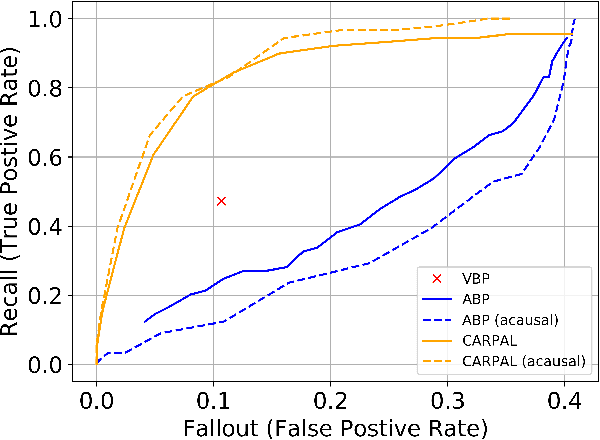
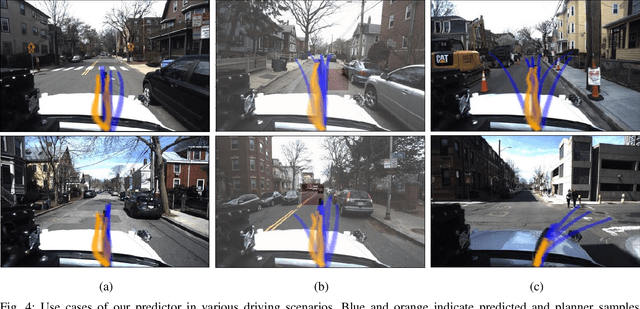
Predicting the behavior of road agents is a difficult and crucial task for both advanced driver assistance and autonomous driving systems. Traditional confidence measures for this important task often ignore the way predicted trajectories affect downstream decisions and their utilities. In this paper we devise a novel neural network regressor to estimate the utility distribution given the predictions. Based on reasonable assumptions on the utility function, we establish a decision criterion that takes into account the role of prediction in decision making. We train our real-time regressor along with a human driver intent predictor and use it in shared autonomy scenarios where decisions depend on the prediction confidence. We test our system on a realistic urban driving dataset, present the advantage of the resulting system in terms of recall and fall-out performance compared to baseline methods, and demonstrate its effectiveness in intervention and warning use cases.
Diversity-Aware Vehicle Motion Prediction via Latent Semantic Sampling
Nov 28, 2019
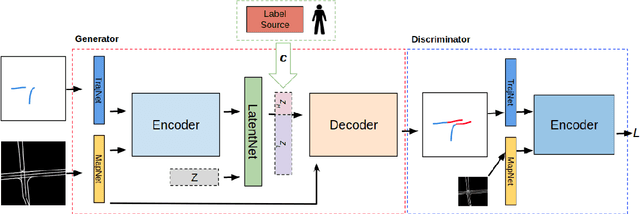

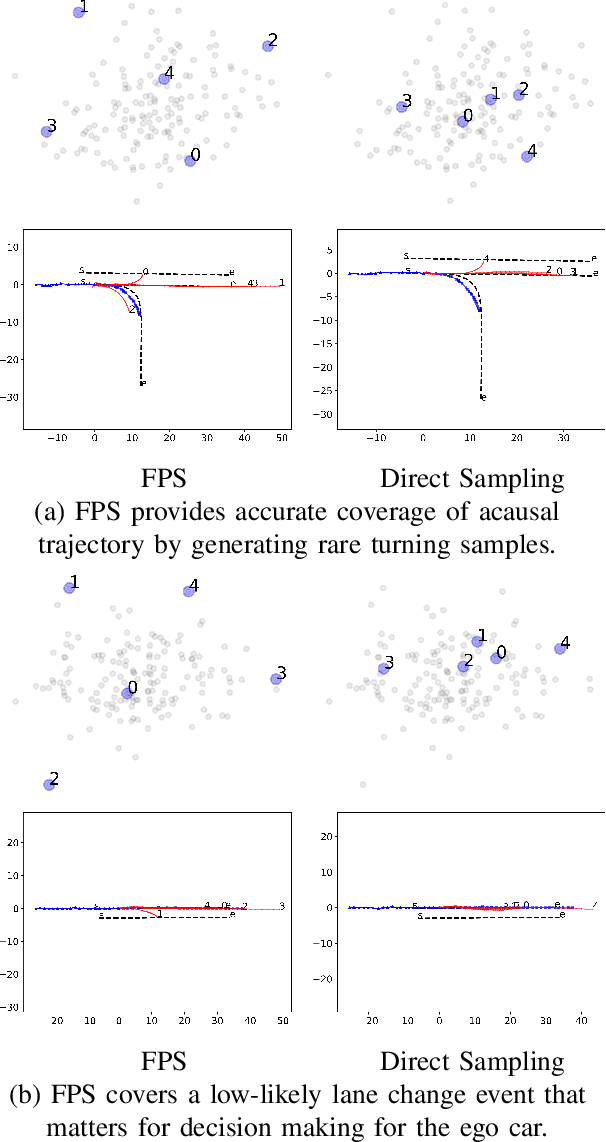
Vehicle trajectory prediction is crucial for autonomous driving and advanced driver assistant systems. While existing approaches may sample from a predicted distribution of vehicle trajectories, they lack the ability to explore it - a key ability for evaluating safety from a planning and verification perspective. In this work, we devise a novel approach for generating realistic and diverse vehicle trajectories. We extend the generative adversarial network (GAN) framework with a low-dimensional approximate semantic space, and shape that space to capture semantics such as merging and turning. We sample from this space in a way that mimics the predicted distribution, but allows us to control coverage of semantically distinct outcomes. We validate our approach on a publicly available dataset and show results that achieve state of the art prediction performance, while providing improved coverage of the space of predicted trajectory semantics.
Uncertainty-Aware Driver Trajectory Prediction at Urban Intersections
Mar 06, 2019


Predicting the motion of a driver's vehicle is crucial for advanced driving systems, enabling detection of potential risks towards shared control between the driver and automation systems. In this paper, we propose a variational neural network approach that predicts future driver trajectory distributions for the vehicle based on multiple sensors. Our predictor generates both a conditional variational distribution of future trajectories, as well as a confidence estimate for different time horizons. Our approach allows us to handle inherently uncertain situations, and reason about information gain from each input, as well as combine our model with additional predictors, creating a mixture of experts. We show how to augment the variational predictor with a physics-based predictor, and based on their confidence estimations, improve overall system performance. The resulting combined model is aware of the uncertainty associated with its predictions, which can help the vehicle autonomy to make decisions with more confidence. The model is validated on real-world urban driving data collected in multiple locations. This validation demonstrates that our approach improves the prediction error of a physics-based model by 25% while successfully identifying the uncertain cases with 82% accuracy.