 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety with Agency: Human-Centered Safety Filter with Application to AI-Assisted Motorsports
Apr 16, 2025We propose a human-centered safety filter (HCSF) for shared autonomy that significantly enhances system safety without compromising human agency. Our HCSF is built on a neural safety value function, which we first learn scalably through black-box interactions and then use at deployment to enforce a novel quality control barrier function (Q-CBF) safety constraint. Since this Q-CBF safety filter does not require any knowledge of the system dynamics for both synthesis and runtime safety monitoring and intervention, our method applies readily to complex, black-box shared autonomy systems. Notably, our HCSF's CBF-based interventions modify the human's actions minimally and smoothly, avoiding the abrupt, last-moment corrections delivered by many conventional safety filters. We validate our approach in a comprehensive in-person user study using Assetto Corsa-a high-fidelity car racing simulator with black-box dynamics-to assess robustness in "driving on the edge" scenarios. We compare both trajectory data and drivers' perceptions of our HCSF assistance against unassisted driving and a conventional safety filter. Experimental results show that 1) compared to having no assistance, our HCSF improves both safety and user satisfaction without compromising human agency or comfort, and 2) relative to a conventional safety filter, our proposed HCSF boosts human agency, comfort, and satisfaction while maintaining robustness.
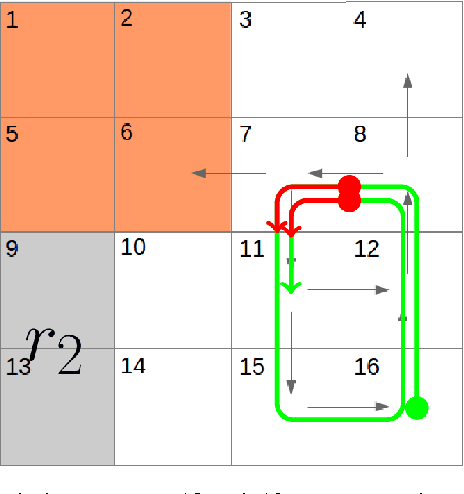
Implicit Multi-Agent Coordination at Unsignalized Intersections via Topological Inference
Apr 10, 2020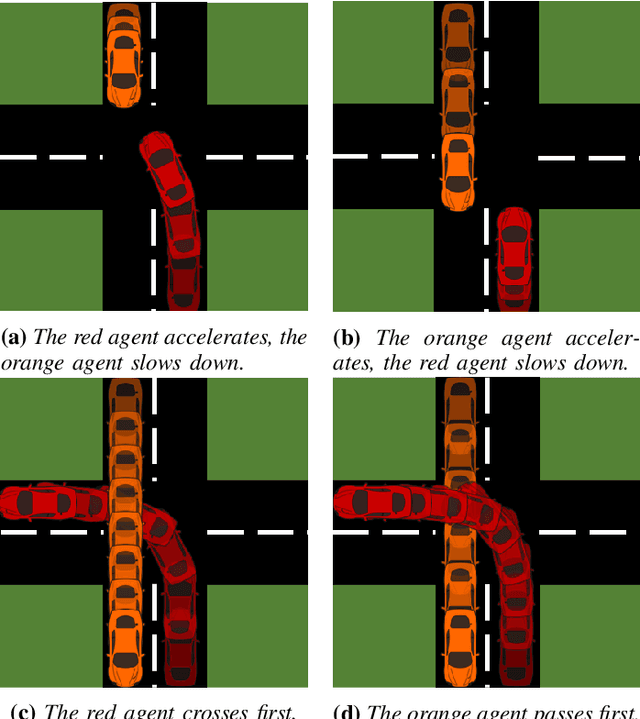
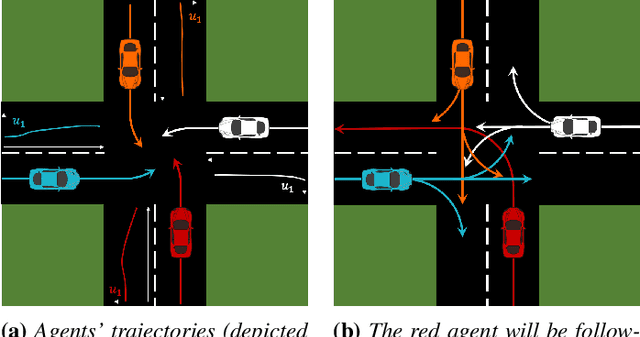
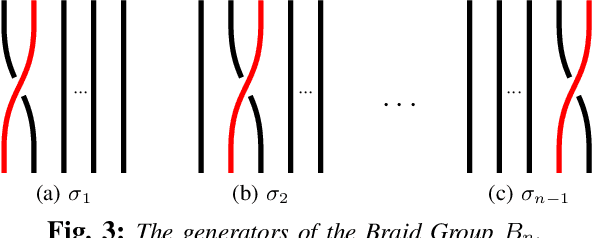
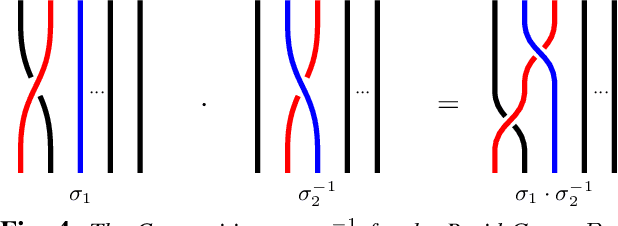
We focus on scenarios in which multiple rational, non-communicating agents navigate in close proximity, such as unsignalized street intersections. In these situations, decentralized coordination to achieve safe and efficient motion demands nuanced implicit communication between the agents. Often, the spatial structure of such environments constrains multi-agent trajectories to belong to a finite set of modes, each corresponding to a distinct spatiotemporal topology. Our key insight is that empowering agents with a model of this structure can enable effective coordination through implicit communication, realized via intent signals encoded in agents' actions. In this paper, we do so by representing modes of joint behavior as topological braids. We design a decentralized planning framework that incorporates a mechanism for inferring the emerging braid in the decision-making process. By executing actions that minimize the uncertainty over the upcoming braid, agents converge rapidly to a consensus over a joint collision avoidance strategy despite lacking knowledge of the destinations of others and accurate models of their behaviors. We validate our approach with a case study in a four-way unsignalized intersection involving a series of challenging multi-agent scenarios. Our findings show that our model reduces frequency of collisions by at least 65% over a set of explicit trajectory prediction baselines, while maintaining comparable efficiency.
CARPAL: Confidence-Aware Intent Recognition for Parallel Autonomy
Mar 18, 2020
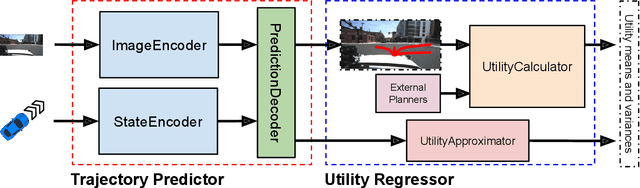
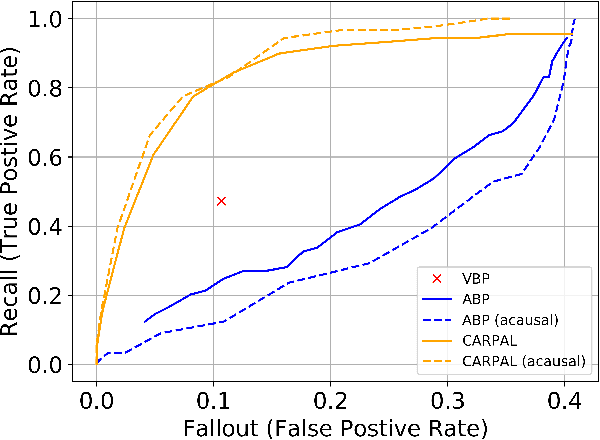
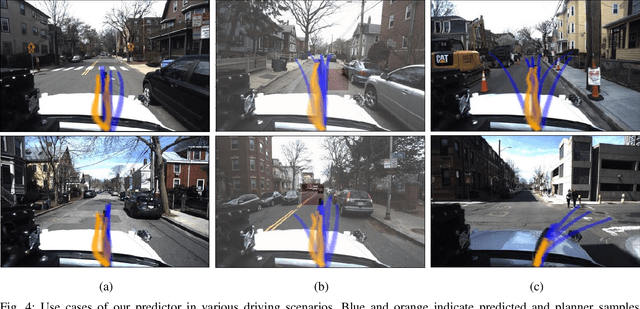
Predicting the behavior of road agents is a difficult and crucial task for both advanced driver assistance and autonomous driving systems. Traditional confidence measures for this important task often ignore the way predicted trajectories affect downstream decisions and their utilities. In this paper we devise a novel neural network regressor to estimate the utility distribution given the predictions. Based on reasonable assumptions on the utility function, we establish a decision criterion that takes into account the role of prediction in decision making. We train our real-time regressor along with a human driver intent predictor and use it in shared autonomy scenarios where decisions depend on the prediction confidence. We test our system on a realistic urban driving dataset, present the advantage of the resulting system in terms of recall and fall-out performance compared to baseline methods, and demonstrate its effectiveness in intervention and warning use cases.
Diversity-Aware Vehicle Motion Prediction via Latent Semantic Sampling
Nov 28, 2019
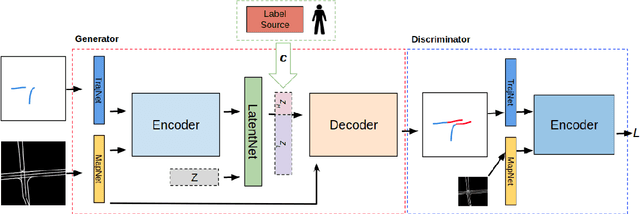

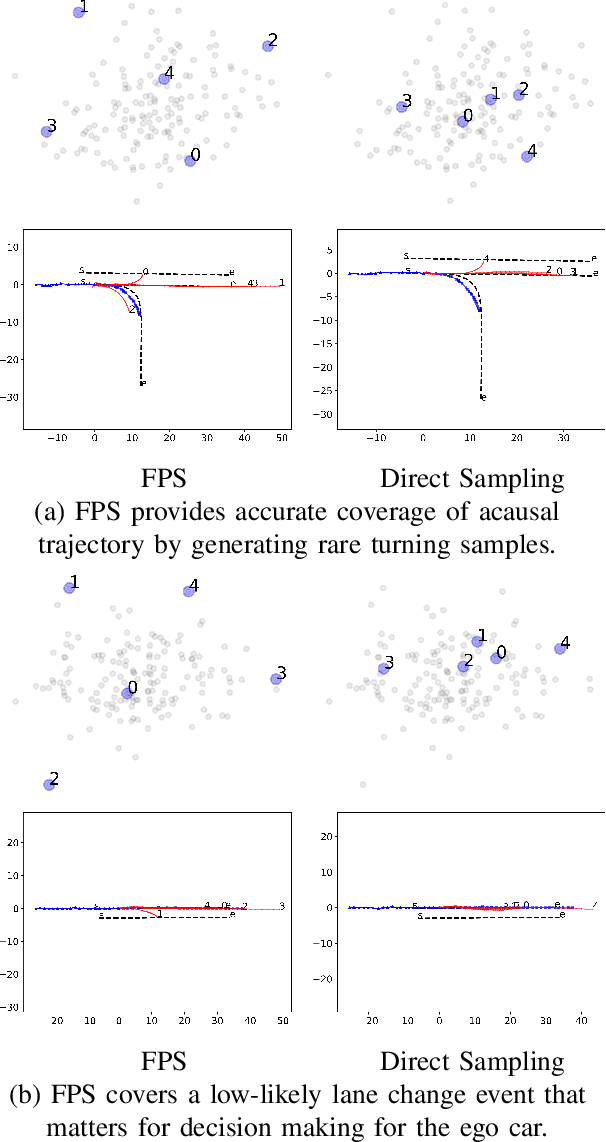
Vehicle trajectory prediction is crucial for autonomous driving and advanced driver assistant systems. While existing approaches may sample from a predicted distribution of vehicle trajectories, they lack the ability to explore it - a key ability for evaluating safety from a planning and verification perspective. In this work, we devise a novel approach for generating realistic and diverse vehicle trajectories. We extend the generative adversarial network (GAN) framework with a low-dimensional approximate semantic space, and shape that space to capture semantics such as merging and turning. We sample from this space in a way that mimics the predicted distribution, but allows us to control coverage of semantically distinct outcomes. We validate our approach on a publicly available dataset and show results that achieve state of the art prediction performance, while providing improved coverage of the space of predicted trajectory semantics.
Dynamics-Based Reactive Synthesis and Automated Revisions for High-Level Robot Control
Jan 13, 2016
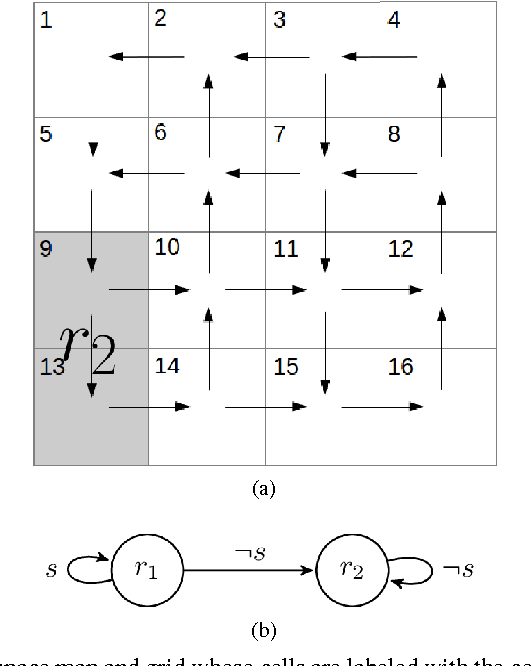
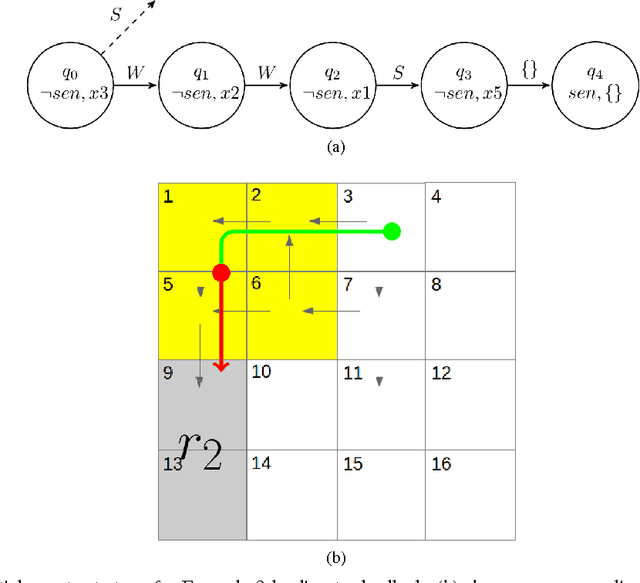
The aim of this work is to address issues where formal specifications cannot be realized on a given dynamical system subjected to a changing environment. Such failures occur whenever the dynamics of the system restrict the robot in such a way that the environment may prevent the robot from progressing safely to its goals. We provide a framework that automatically synthesizes revisions to such specifications that restrict the assumed behaviors of the environment and the behaviors of the system. We provide a means for explaining such modifications to the user in a concise, easy-to-understand manner. Integral to the framework is a new algorithm for synthesizing controllers for reactive specifications that include a discrete representation of the robot's dynamics. The new approach is demonstrated with a complex task implemented using a unicycle model.