 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgents' Last Exam
Jun 03, 2026Recent AI systems have achieved strong results on a wide range of benchmarks, yet these gains have not translated into economically meaningful deployment across many professional domains. We argue that this gap is largely an evaluation problem: widely used benchmarks lack sustained performance measurement on real and economically valuable workflows. This paper introduces Agents' Last Exam (ALE), a benchmark designed to evaluate AI agents on long-horizon, economically valuable, real-world tasks with verifiable outcomes. Developed in collaboration with 250+ industry experts, ALE covers non-physical industries defined with reference to O*NET / SOC 2018 (the U.S. federal occupational taxonomy). It is organized around a task taxonomy with 55 subfields grouped into 13 industry clusters covering 1K+ tasks. Current results show that the hardest tier remains far from saturated: across mainstream harness and backbone configurations, the average full pass rate is 2.6%. ALE is designed as a living benchmark: its task pool grows continuously as new workflows and industries are onboarded. More broadly, ALE is intended not merely as another leaderboard, but as an instrument for closing the gap between benchmark success and GDP-relevant impact.
Permissive Safety Through Trusted Inference: Verifiable Belief-Space Neural Safety Filters for Assured Interactive Robotics
Jun 01, 2026Autonomous robots that interact with people must make safe and efficient decisions under human-induced uncertainty, such as their preferences, goals, competency, and willingness to cooperate. Safety filters are a popular approach for ensuring safety in interactive robotics, since their modular design separates safety from performance, allowing robots to operate safely around people with minimal impact on task efficiency. While traditional safety filters typically operate only in the physical space, neglecting the robot's ability to learn and adapt online, the recently proposed belief-space safety filter (BeliefSF) reasons about robot safety in closed-loop with runtime inference that actively reduces the robot's uncertainty online, thereby reducing conservativeness in filtering. However, providing formal safety guarantees for robots deploying BeliefSF remains a significant challenge due to errors in runtime inference and neural approximation of safety filters required to handle the high dimensionality of belief spaces. In this paper, we propose an algorithmic approach to certify high-probability safety of BeliefSF using conformal prediction, while explicitly accounting for the reliability of the robot's runtime inference module. Our method leverages the structure of belief-space safety filtering by focusing verification on a region where inference is expected to be reliable. It preserves the simplicity and sample complexity of standard conformal prediction, yet can certify a substantially less conservative safety filter. Through a simulated human-vehicle interaction benchmark, we show that our approach verifies a significantly more permissive belief-space safety filter than a standard conformal prediction baseline.
Synthesis and Deployment of Maximal Robust Control Barrier Functions through Adversarial Reinforcement Learning
Apr 14, 2026Robust control barrier functions (CBFs) provide a principled mechanism for smooth safety enforcement under worst-case disturbances. However, existing approaches typically rely on explicit, closed-form structure in the dynamics (e.g., control-affine) and uncertainty models. This has led to limited scalability and generality, with most robust CBFs certifying only conservative subsets of the maximal robust safe set. In this paper, we introduce a new robust CBF framework for general nonlinear systems under bounded uncertainty. We first show that the safety value function solving the dynamic programming Isaacs equation is a valid robust discrete-time CBF that enforces safety on the maximal robust safe set. We then adopt the key reinforcement learning (RL) notion of quality function (or Q-function), which removes the need for explicit dynamics by lifting the barrier certificate into state-action space and yields a novel robust Q-CBF constraint for safety filtering. Combined with adversarial RL, this enables the synthesis and deployment of robust Q-CBFs on general nonlinear systems with black-box dynamics and unknown uncertainty structure. We validate the framework on a canonical inverted pendulum benchmark and a 36-D quadruped simulator, achieving substantially less conservative safe sets than barrier-based baselines on the pendulum and reliable safety enforcement even under adversarial uncertainty realizations on the quadruped.
Machine Bullshit: Characterizing the Emergent Disregard for Truth in Large Language Models
Jul 10, 2025Bullshit, as conceptualized by philosopher Harry Frankfurt, refers to statements made without regard to their truth value. While previous work has explored large language model (LLM) hallucination and sycophancy, we propose machine bullshit as an overarching conceptual framework that can allow researchers to characterize the broader phenomenon of emergent loss of truthfulness in LLMs and shed light on its underlying mechanisms. We introduce the Bullshit Index, a novel metric quantifying LLMs' indifference to truth, and propose a complementary taxonomy analyzing four qualitative forms of bullshit: empty rhetoric, paltering, weasel words, and unverified claims. We conduct empirical evaluations on the Marketplace dataset, the Political Neutrality dataset, and our new BullshitEval benchmark (2,400 scenarios spanning 100 AI assistants) explicitly designed to evaluate machine bullshit. Our results demonstrate that model fine-tuning with reinforcement learning from human feedback (RLHF) significantly exacerbates bullshit and inference-time chain-of-thought (CoT) prompting notably amplify specific bullshit forms, particularly empty rhetoric and paltering. We also observe prevalent machine bullshit in political contexts, with weasel words as the dominant strategy. Our findings highlight systematic challenges in AI alignment and provide new insights toward more truthful LLM behavior.
Safety with Agency: Human-Centered Safety Filter with Application to AI-Assisted Motorsports
Apr 16, 2025We propose a human-centered safety filter (HCSF) for shared autonomy that significantly enhances system safety without compromising human agency. Our HCSF is built on a neural safety value function, which we first learn scalably through black-box interactions and then use at deployment to enforce a novel quality control barrier function (Q-CBF) safety constraint. Since this Q-CBF safety filter does not require any knowledge of the system dynamics for both synthesis and runtime safety monitoring and intervention, our method applies readily to complex, black-box shared autonomy systems. Notably, our HCSF's CBF-based interventions modify the human's actions minimally and smoothly, avoiding the abrupt, last-moment corrections delivered by many conventional safety filters. We validate our approach in a comprehensive in-person user study using Assetto Corsa-a high-fidelity car racing simulator with black-box dynamics-to assess robustness in "driving on the edge" scenarios. We compare both trajectory data and drivers' perceptions of our HCSF assistance against unassisted driving and a conventional safety filter. Experimental results show that 1) compared to having no assistance, our HCSF improves both safety and user satisfaction without compromising human agency or comfort, and 2) relative to a conventional safety filter, our proposed HCSF boosts human agency, comfort, and satisfaction while maintaining robustness.
RLHS: Mitigating Misalignment in RLHF with Hindsight Simulation
Jan 15, 2025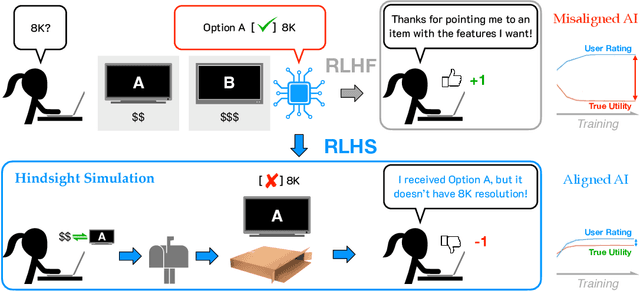



Generative AI systems like foundation models (FMs) must align well with human values to ensure their behavior is helpful and trustworthy. While Reinforcement Learning from Human Feedback (RLHF) has shown promise for optimizing model performance using human judgments, existing RLHF pipelines predominantly rely on immediate feedback, which can fail to accurately reflect the downstream impact of an interaction on users' utility. We demonstrate that feedback based on evaluators' foresight estimates of downstream consequences systematically induces Goodhart's Law dynamics, incentivizing misaligned behaviors like sycophancy and deception and ultimately degrading user outcomes. To alleviate this, we propose decoupling evaluation from prediction by refocusing RLHF on hindsight feedback. Our theoretical analysis reveals that conditioning evaluator feedback on downstream observations mitigates misalignment and improves expected human utility, even when these observations are simulated by the AI system itself. To leverage this insight in a practical alignment algorithm, we introduce Reinforcement Learning from Hindsight Simulation (RLHS), which first simulates plausible consequences and then elicits feedback to assess what behaviors were genuinely beneficial in hindsight. We apply RLHS to two widely-employed online and offline preference optimization methods -- Proximal Policy Optimization (PPO) and Direct Preference Optimization (DPO) -- and show empirically that misalignment is significantly reduced with both methods. Through an online human user study, we show that RLHS consistently outperforms RLHF in helping users achieve their goals and earns higher satisfaction ratings, despite being trained solely with simulated hindsight feedback. These results underscore the importance of focusing on long-term consequences, even simulated ones, to mitigate misalignment in RLHF.
MAGICS: Adversarial RL with Minimax Actors Guided by Implicit Critic Stackelberg for Convergent Neural Synthesis of Robot Safety
Sep 20, 2024While robust optimal control theory provides a rigorous framework to compute robot control policies that are provably safe, it struggles to scale to high-dimensional problems, leading to increased use of deep learning for tractable synthesis of robot safety. Unfortunately, existing neural safety synthesis methods often lack convergence guarantees and solution interpretability. In this paper, we present Minimax Actors Guided by Implicit Critic Stackelberg (MAGICS), a novel adversarial reinforcement learning (RL) algorithm that guarantees local convergence to a minimax equilibrium solution. We then build on this approach to provide local convergence guarantees for a general deep RL-based robot safety synthesis algorithm. Through both simulation studies on OpenAI Gym environments and hardware experiments with a 36-dimensional quadruped robot, we show that MAGICS can yield robust control policies outperforming the state-of-the-art neural safety synthesis methods.
Think Deep and Fast: Learning Neural Nonlinear Opinion Dynamics from Inverse Dynamic Games for Split-Second Interactions
Jun 14, 2024
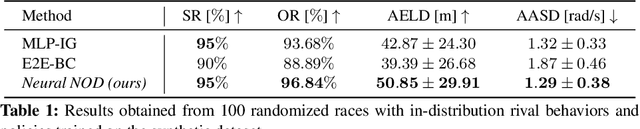


Non-cooperative interactions commonly occur in multi-agent scenarios such as car racing, where an ego vehicle can choose to overtake the rival, or stay behind it until a safe overtaking "corridor" opens. While an expert human can do well at making such time-sensitive decisions, the development of safe and efficient game-theoretic trajectory planners capable of rapidly reasoning discrete options is yet to be fully addressed. The recently developed nonlinear opinion dynamics (NOD) show promise in enabling fast opinion formation and avoiding safety-critical deadlocks. However, it remains an open challenge to determine the model parameters of NOD automatically and adaptively, accounting for the ever-changing environment of interaction. In this work, we propose for the first time a learning-based, game-theoretic approach to synthesize a Neural NOD model from expert demonstrations, given as a dataset containing (possibly incomplete) state and action trajectories of interacting agents. The learned NOD can be used by existing dynamic game solvers to plan decisively while accounting for the predicted change of other agents' intents, thus enabling situational awareness in planning. We demonstrate Neural NOD's ability to make fast and robust decisions in a simulated autonomous racing example, leading to tangible improvements in safety and overtaking performance over state-of-the-art data-driven game-theoretic planning methods.
Blending Data-Driven Priors in Dynamic Games
Feb 23, 2024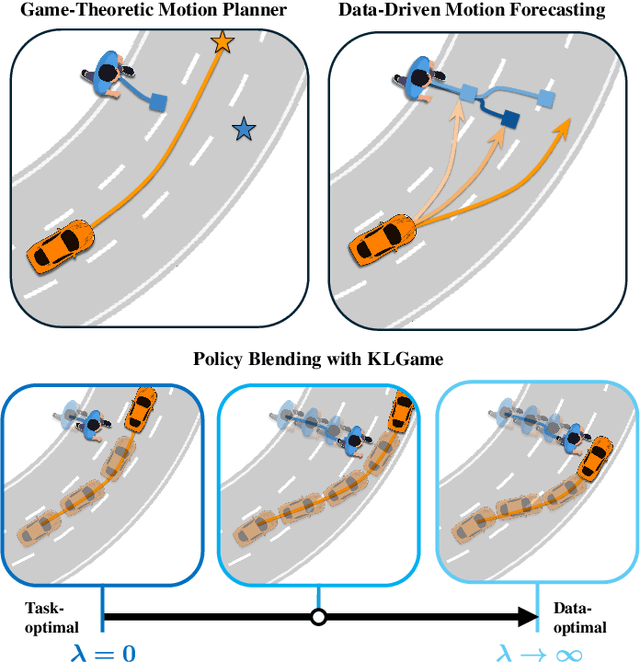
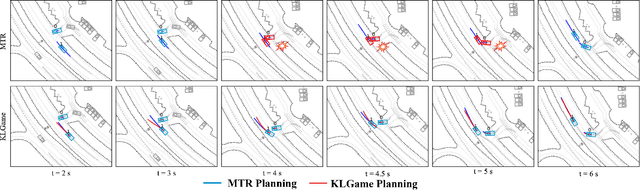
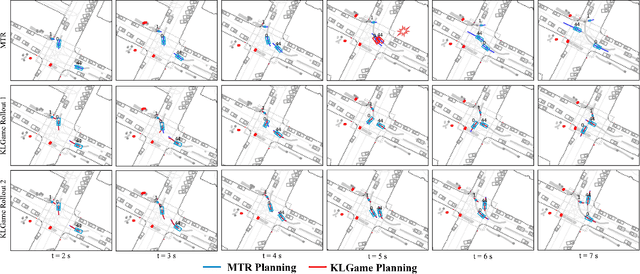
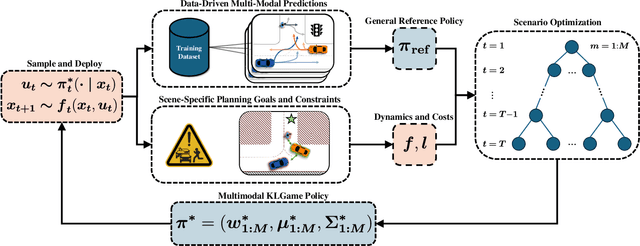
As intelligent robots like autonomous vehicles become increasingly deployed in the presence of people, the extent to which these systems should leverage model-based game-theoretic planners versus data-driven policies for safe, interaction-aware motion planning remains an open question. Existing dynamic game formulations assume all agents are task-driven and behave optimally. However, in reality, humans tend to deviate from the decisions prescribed by these models, and their behavior is better approximated under a noisy-rational paradigm. In this work, we investigate a principled methodology to blend a data-driven reference policy with an optimization-based game-theoretic policy. We formulate KLGame, a type of non-cooperative dynamic game with Kullback-Leibler (KL) regularization with respect to a general, stochastic, and possibly multi-modal reference policy. Our method incorporates, for each decision maker, a tunable parameter that permits modulation between task-driven and data-driven behaviors. We propose an efficient algorithm for computing multimodal approximate feedback Nash equilibrium strategies of KLGame in real time. Through a series of simulated and real-world autonomous driving scenarios, we demonstrate that KLGame policies can more effectively incorporate guidance from the reference policy and account for noisily-rational human behaviors versus non-regularized baselines.
Who Plays First? Optimizing the Order of Play in Stackelberg Games with Many Robots
Feb 14, 2024



We consider the multi-agent spatial navigation problem of computing the socially optimal order of play, i.e., the sequence in which the agents commit to their decisions, and its associated equilibrium in an N-player Stackelberg trajectory game. We model this problem as a mixed-integer optimization problem over the space of all possible Stackelberg games associated with the order of play's permutations. To solve the problem, we introduce Branch and Play (B&P), an efficient and exact algorithm that provably converges to a socially optimal order of play and its Stackelberg equilibrium. As a subroutine for B&P, we employ and extend sequential trajectory planning, i.e., a popular multi-agent control approach, to scalably compute valid local Stackelberg equilibria for any given order of play. We demonstrate the practical utility of B&P to coordinate air traffic control, swarm formation, and delivery vehicle fleets. We find that B&P consistently outperforms various baselines, and computes the socially optimal equilibrium.