 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThink Deep and Fast: Learning Neural Nonlinear Opinion Dynamics from Inverse Dynamic Games for Split-Second Interactions
Paper and Code
Jun 14, 2024
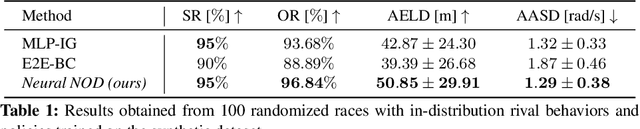


Non-cooperative interactions commonly occur in multi-agent scenarios such as car racing, where an ego vehicle can choose to overtake the rival, or stay behind it until a safe overtaking "corridor" opens. While an expert human can do well at making such time-sensitive decisions, the development of safe and efficient game-theoretic trajectory planners capable of rapidly reasoning discrete options is yet to be fully addressed. The recently developed nonlinear opinion dynamics (NOD) show promise in enabling fast opinion formation and avoiding safety-critical deadlocks. However, it remains an open challenge to determine the model parameters of NOD automatically and adaptively, accounting for the ever-changing environment of interaction. In this work, we propose for the first time a learning-based, game-theoretic approach to synthesize a Neural NOD model from expert demonstrations, given as a dataset containing (possibly incomplete) state and action trajectories of interacting agents. The learned NOD can be used by existing dynamic game solvers to plan decisively while accounting for the predicted change of other agents' intents, thus enabling situational awareness in planning. We demonstrate Neural NOD's ability to make fast and robust decisions in a simulated autonomous racing example, leading to tangible improvements in safety and overtaking performance over state-of-the-art data-driven game-theoretic planning methods.