 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARPAL: Confidence-Aware Intent Recognition for Parallel Autonomy
Paper and Code
Mar 18, 2020
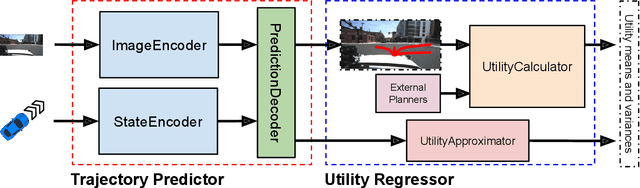
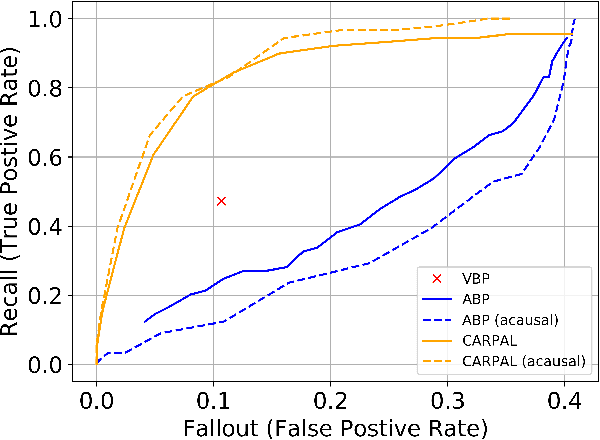
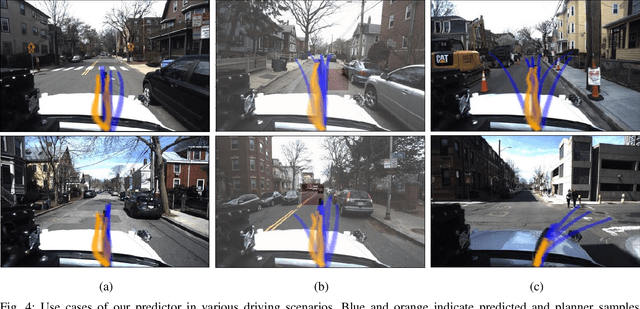
Predicting the behavior of road agents is a difficult and crucial task for both advanced driver assistance and autonomous driving systems. Traditional confidence measures for this important task often ignore the way predicted trajectories affect downstream decisions and their utilities. In this paper we devise a novel neural network regressor to estimate the utility distribution given the predictions. Based on reasonable assumptions on the utility function, we establish a decision criterion that takes into account the role of prediction in decision making. We train our real-time regressor along with a human driver intent predictor and use it in shared autonomy scenarios where decisions depend on the prediction confidence. We test our system on a realistic urban driving dataset, present the advantage of the resulting system in terms of recall and fall-out performance compared to baseline methods, and demonstrate its effectiveness in intervention and warning use cases.