 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINPROVF: Leveraging Large Language Models to Repair High-level Robot Controllers from Assumption Violations
Mar 17, 2025



This paper presents INPROVF, an automatic framework that combines large language models (LLMs) and formal methods to speed up the repair process of high-level robot controllers. Previous approaches based solely on formal methods are computationally expensive and cannot scale to large state spaces. In contrast, INPROVF uses LLMs to generate repair candidates, and formal methods to verify their correctness. To improve the quality of these candidates, our framework first translates the symbolic representations of the environment and controllers into natural language descriptions. If a candidate fails the verification, INPROVF provides feedback on potential unsafe behaviors or unsatisfied tasks, and iteratively prompts LLMs to generate improved solutions. We demonstrate the effectiveness of INPROVF through 12 violations with various workspaces, tasks, and state space sizes.
Physically-Feasible Reactive Synthesis for Terrain-Adaptive Locomotion via Trajectory Optimization and Symbolic Repair
Mar 05, 2025We propose an integrated planning framework for quadrupedal locomotion over dynamically changing, unforeseen terrains. Existing approaches either rely on heuristics for instantaneous foothold selection--compromising safety and versatility--or solve expensive trajectory optimization problems with complex terrain features and long time horizons. In contrast, our framework leverages reactive synthesis to generate correct-by-construction controllers at the symbolic level, and mixed-integer convex programming (MICP) for dynamic and physically feasible footstep planning for each symbolic transition. We use a high-level manager to reduce the large state space in synthesis by incorporating local environment information, improving synthesis scalability. To handle specifications that cannot be met due to dynamic infeasibility, and to minimize costly MICP solves, we leverage a symbolic repair process to generate only necessary symbolic transitions. During online execution, re-running the MICP with real-world terrain data, along with runtime symbolic repair, bridges the gap between offline synthesis and online execution. We demonstrate, in simulation, our framework's capabilities to discover missing locomotion skills and react promptly in safety-critical environments, such as scattered stepping stones and rebars.
Robot Learning as an Empirical Science: Best Practices for Policy Evaluation
Sep 14, 2024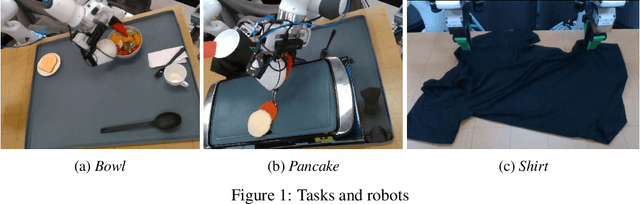
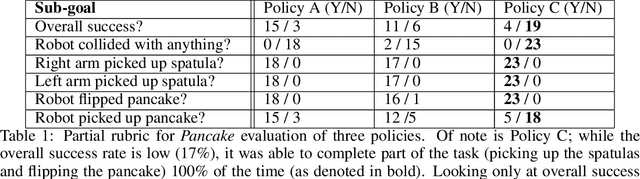
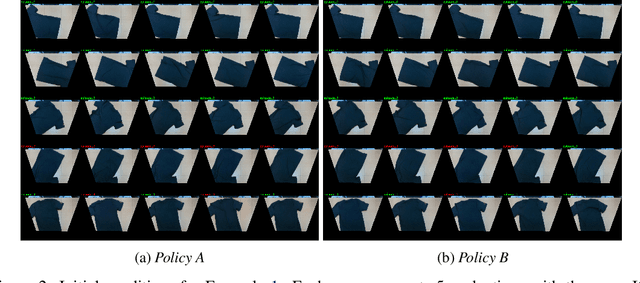
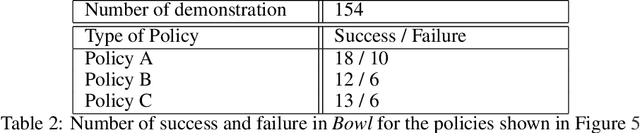
The robot learning community has made great strides in recent years, proposing new architectures and showcasing impressive new capabilities; however, the dominant metric used in the literature, especially for physical experiments, is "success rate", i.e. the percentage of runs that were successful. Furthermore, it is common for papers to report this number with little to no information regarding the number of runs, the initial conditions, and the success criteria, little to no narrative description of the behaviors and failures observed, and little to no statistical analysis of the findings. In this paper we argue that to move the field forward, researchers should provide a nuanced evaluation of their methods, especially when evaluating and comparing learned policies on physical robots. To do so, we propose best practices for future evaluations: explicitly reporting the experimental conditions, evaluating several metrics designed to complement success rate, conducting statistical analysis, and adding a qualitative description of failures modes. We illustrate these through an evaluation on physical robots of several learned policies for manipulation tasks.
Online Resynthesis of High-Level Collaborative Tasks for Robots with Changing Capabilities
Sep 09, 2024Given a collaborative high-level task and a team of heterogeneous robots and behaviors to satisfy it, this work focuses on the challenge of automatically, at runtime, adjusting the individual robot behaviors such that the task is still satisfied, when robots encounter changes to their abilities--either failures or additional actions they can perform. We consider tasks encoded in LTL^\psi and minimize global teaming reassignments (and as a result, local resynthesis) when robots' capabilities change. We also increase the expressivity of LTL^\psi by including additional types of constraints on the overall teaming assignment that the user can specify, such as the minimum number of robots required for each assignment. We demonstrate the framework in a simulated warehouse scenario.
Automated Robot Recovery from Assumption Violations of High-Level Specifications
Jul 02, 2024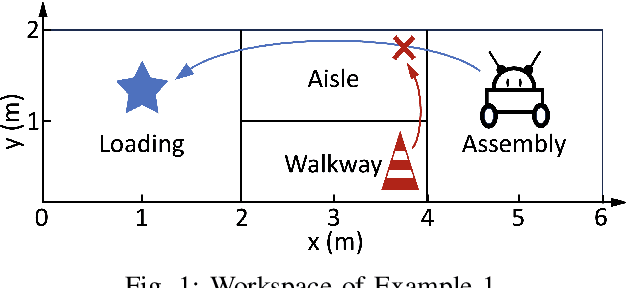
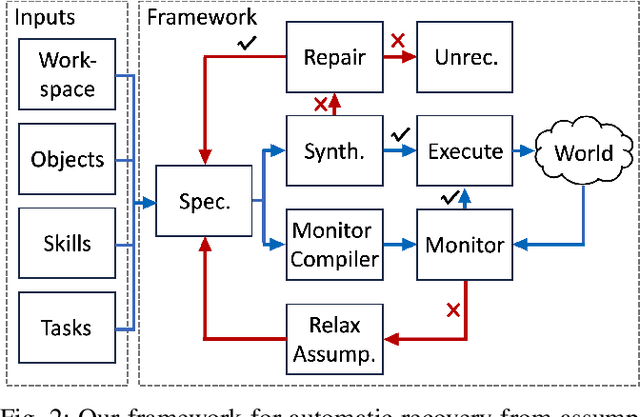
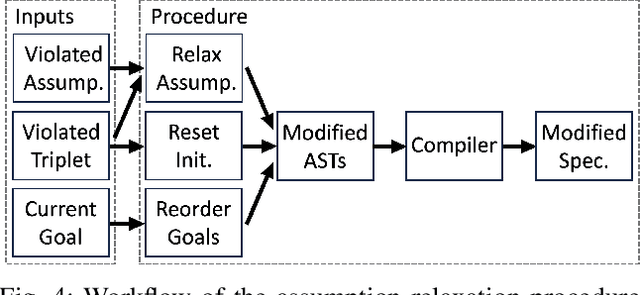
This paper presents a framework that enables robots to automatically recover from assumption violations of high-level specifications during task execution. In contrast to previous methods relying on user intervention to impose additional assumptions for failure recovery, our approach leverages synthesis-based repair to suggest new robot skills that, when implemented, repair the task. Our approach detects violations of environment safety assumptions during the task execution, relaxes the assumptions to admit observed environment behaviors, and acquires new robot skills for task completion. We demonstrate our approach with a Hello Robot Stretch in a factory-like scenario.
Continuous Execution of High-Level Collaborative Tasks for Heterogeneous Robot Teams
Jun 26, 2024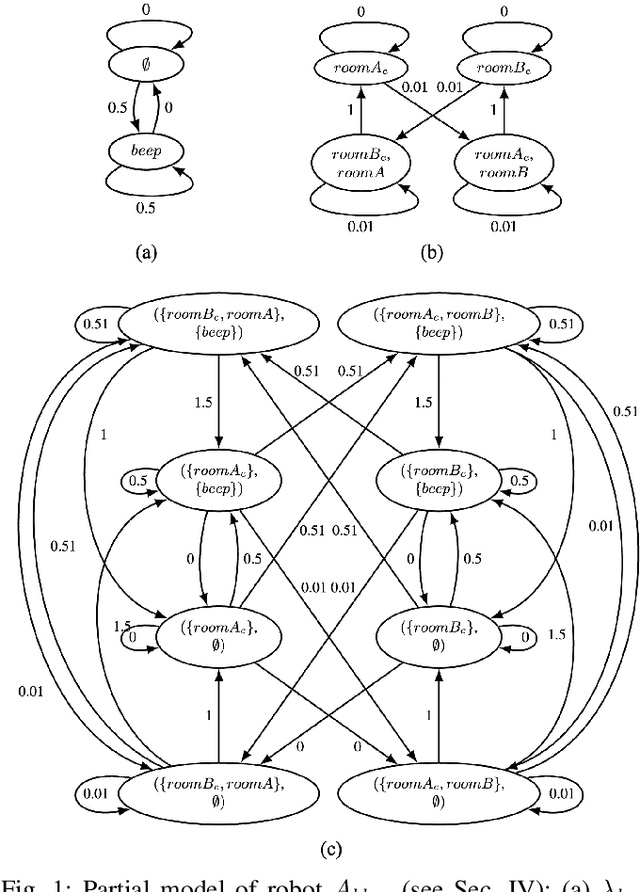



We propose a control synthesis framework for a heterogeneous multi-robot system to satisfy collaborative tasks, where actions may take varying duration of time to complete. We encode tasks using the discrete logic LTL^\psi, which uses the concept of bindings to interleave robot actions and express information about relationship between specific task requirements and robot assignments. We present a synthesis approach to automatically generate a teaming assignment and corresponding discrete behavior that is correct-by-construction for continuous execution, while also implementing synchronization policies to ensure collaborative portions of the task are satisfied. We demonstrate our approach on a physical multi-robot system.
Multi-Source Encapsulation With Guaranteed Convergence Using Minimalist Robots
Apr 29, 2024



We present a decentralized control algorithm for a minimalist robotic swarm lacking memory, explicit communication, or relative position information, to encapsulate multiple diffusive target sources in a bounded environment. The state-of-the-art approaches generally require either local communication or relative localization to provide guarantees of convergence and safety. We quantify trade-offs between task, control, and robot parameters for guaranteed safe convergence to all the sources. Furthermore, our algorithm is robust to occlusions and noise in the sensor measurements as we demonstrate in simulation.
High-Level, Collaborative Task Planning Grammar and Execution for Heterogeneous Agents
Feb 01, 2024

We propose a new multi-agent task grammar to encode collaborative tasks for a team of heterogeneous agents that can have overlapping capabilities. The grammar allows users to specify the relationship between agents and parts of the task without providing explicit assignments or constraints on the number of agents required. We develop a method to automatically find a team of agents and synthesize correct-by-construction control with synchronization policies to satisfy the task. We demonstrate the scalability of our approach through simulation and compare our method to existing task grammars that encode multi-agent tasks.
Ensuring Reliable Robot Task Performance through Probabilistic Rare-Event Verification and Synthesis
Apr 28, 2023Providing guarantees on the safe operation of robots against edge cases is challenging as testing methods such as traditional Monte-Carlo require too many samples to provide reasonable statistics. Built upon recent advancements in rare-event sampling, we present a model-based method to verify if a robotic system satisfies a Signal Temporal Logic (STL) specification in the face of environment variations and sensor/actuator noises. Our method is efficient and applicable to both linear and nonlinear and even black-box systems with arbitrary, but known, uncertainty distributions. For linear systems with Gaussian uncertainties, we exploit a feature to find optimal parameters that minimize the probability of failure. We demonstrate illustrative examples on applying our approach to real-world autonomous robotic systems.
Online Modifications for Event-based Signal Temporal Logic Specifications
Mar 31, 2023In this paper we present a grammar and control synthesis framework for online modification of Event-based Signal Temporal Logic (STL) specifications, during execution. These modifications allow a user to change the robots' task in response to potential future violations, changes to the environment, or user-defined task design changes. In cases where a modification is not possible, we provide feedback to the user and suggest alternative modifications. We demonstrate our task modification process using a Hello Robot Stretch satisfying an Event-based STL specification.