 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINPROVF: Leveraging Large Language Models to Repair High-level Robot Controllers from Assumption Violations
Mar 17, 2025



This paper presents INPROVF, an automatic framework that combines large language models (LLMs) and formal methods to speed up the repair process of high-level robot controllers. Previous approaches based solely on formal methods are computationally expensive and cannot scale to large state spaces. In contrast, INPROVF uses LLMs to generate repair candidates, and formal methods to verify their correctness. To improve the quality of these candidates, our framework first translates the symbolic representations of the environment and controllers into natural language descriptions. If a candidate fails the verification, INPROVF provides feedback on potential unsafe behaviors or unsatisfied tasks, and iteratively prompts LLMs to generate improved solutions. We demonstrate the effectiveness of INPROVF through 12 violations with various workspaces, tasks, and state space sizes.
Physically-Feasible Reactive Synthesis for Terrain-Adaptive Locomotion via Trajectory Optimization and Symbolic Repair
Mar 05, 2025We propose an integrated planning framework for quadrupedal locomotion over dynamically changing, unforeseen terrains. Existing approaches either rely on heuristics for instantaneous foothold selection--compromising safety and versatility--or solve expensive trajectory optimization problems with complex terrain features and long time horizons. In contrast, our framework leverages reactive synthesis to generate correct-by-construction controllers at the symbolic level, and mixed-integer convex programming (MICP) for dynamic and physically feasible footstep planning for each symbolic transition. We use a high-level manager to reduce the large state space in synthesis by incorporating local environment information, improving synthesis scalability. To handle specifications that cannot be met due to dynamic infeasibility, and to minimize costly MICP solves, we leverage a symbolic repair process to generate only necessary symbolic transitions. During online execution, re-running the MICP with real-world terrain data, along with runtime symbolic repair, bridges the gap between offline synthesis and online execution. We demonstrate, in simulation, our framework's capabilities to discover missing locomotion skills and react promptly in safety-critical environments, such as scattered stepping stones and rebars.
Automated Robot Recovery from Assumption Violations of High-Level Specifications
Jul 02, 2024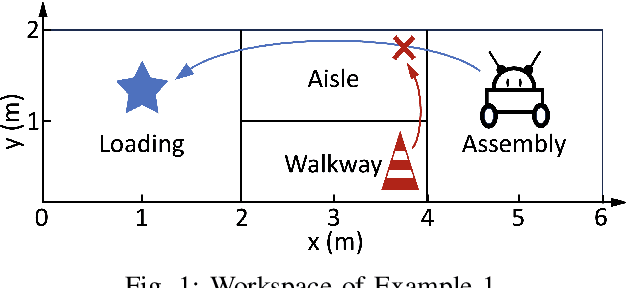
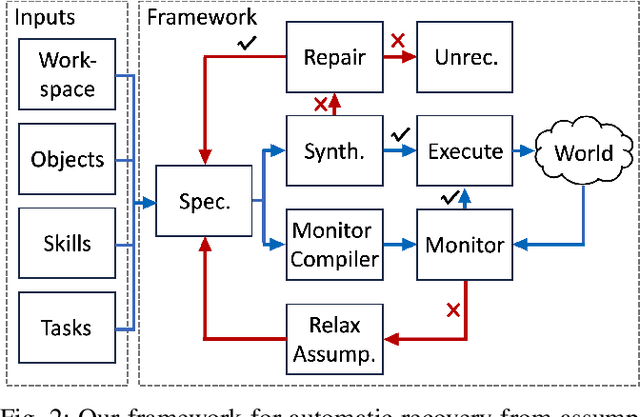
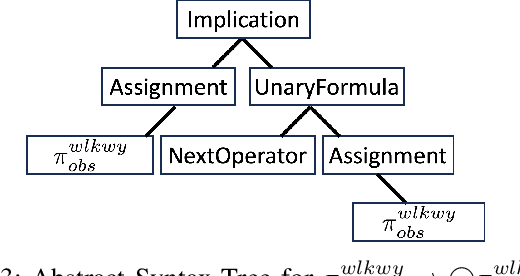
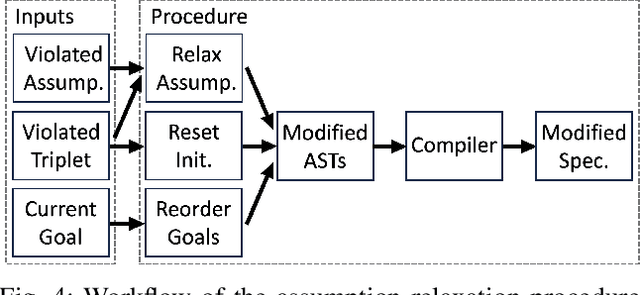
This paper presents a framework that enables robots to automatically recover from assumption violations of high-level specifications during task execution. In contrast to previous methods relying on user intervention to impose additional assumptions for failure recovery, our approach leverages synthesis-based repair to suggest new robot skills that, when implemented, repair the task. Our approach detects violations of environment safety assumptions during the task execution, relaxes the assumptions to admit observed environment behaviors, and acquires new robot skills for task completion. We demonstrate our approach with a Hello Robot Stretch in a factory-like scenario.