 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Learning as an Empirical Science: Best Practices for Policy Evaluation
Sep 14, 2024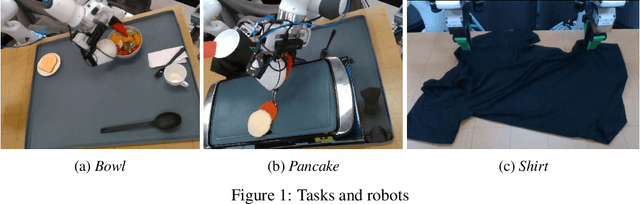
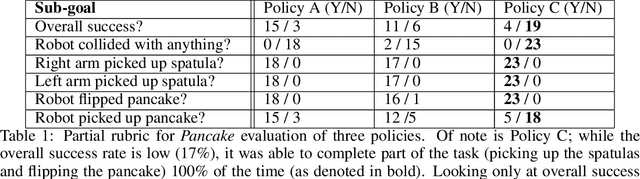
The robot learning community has made great strides in recent years, proposing new architectures and showcasing impressive new capabilities; however, the dominant metric used in the literature, especially for physical experiments, is "success rate", i.e. the percentage of runs that were successful. Furthermore, it is common for papers to report this number with little to no information regarding the number of runs, the initial conditions, and the success criteria, little to no narrative description of the behaviors and failures observed, and little to no statistical analysis of the findings. In this paper we argue that to move the field forward, researchers should provide a nuanced evaluation of their methods, especially when evaluating and comparing learned policies on physical robots. To do so, we propose best practices for future evaluations: explicitly reporting the experimental conditions, evaluating several metrics designed to complement success rate, conducting statistical analysis, and adding a qualitative description of failures modes. We illustrate these through an evaluation on physical robots of several learned policies for manipulation tasks.
Soft-bubble: A highly compliant dense geometry tactile sensor for robot manipulation
Apr 03, 2019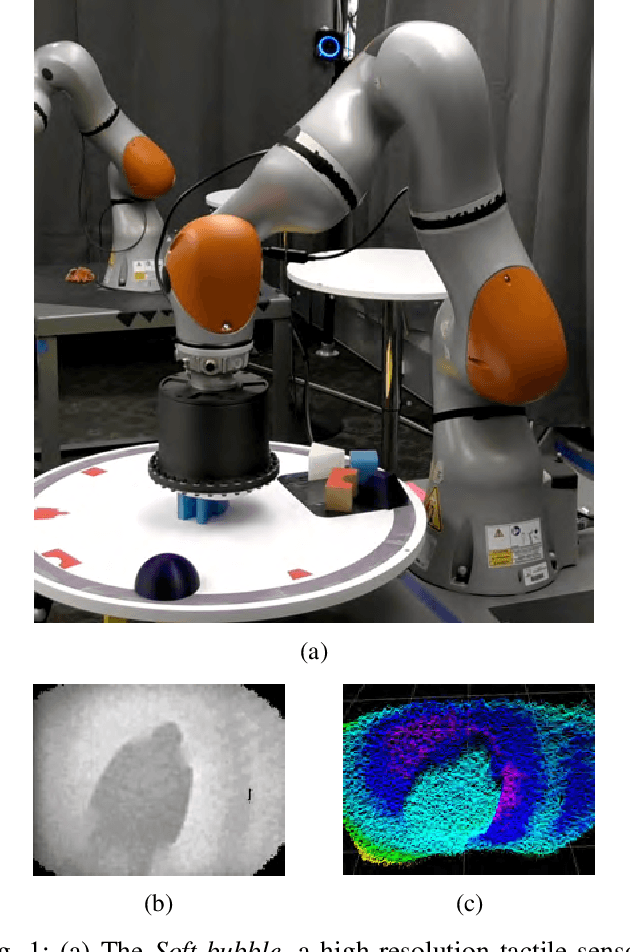
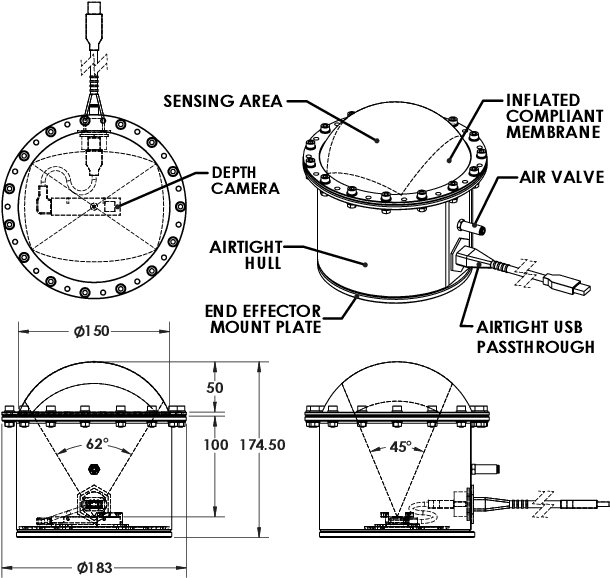
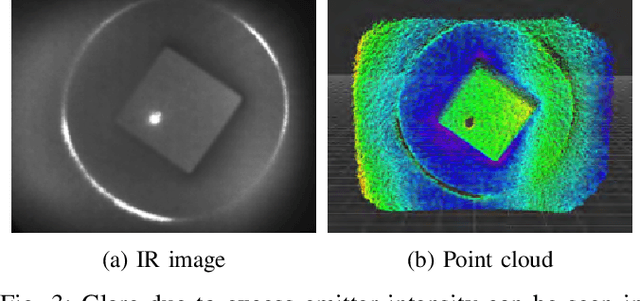

Incorporating effective tactile sensing and mechanical compliance is key towards enabling robust and safe operation of robots in unknown, uncertain and cluttered environments. Towards realizing this goal, we present a lightweight, easy-to-build, highly compliant dense geometry sensor and end effector that comprises an inflated latex membrane with a depth sensor behind it. We present the motivations and the hardware design for this Soft-bubble and demonstrate its capabilities through example tasks including tactile-object classification, pose estimation and tracking, and nonprehensile object manipulation. We also present initial experiments to show the importance of high-resolution geometry sensing for tactile tasks and discuss applications in robust manipulation.