 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePunyo-1: Soft tactile-sensing upper-body robot for large object manipulation and physical human interaction
Nov 17, 2021



The manipulation of large objects and the ability to safely operate in the vicinity of humans are key capabilities of a general purpose domestic robotic assistant. We present the design of a soft, tactile-sensing humanoid upper-body robot and demonstrate whole-body rich-contact manipulation strategies for handling large objects. We demonstrate our hardware design philosophy for outfitting off-the-shelf hard robot arms and other upper-body components with soft tactile-sensing modules, including: (i) low-cost, cut-resistant, contact pressure localizing coverings for the arms, (ii) paws based on TRI's Soft-bubble sensors for the end effectors, and (iii) compliant force/geometry sensors for the coarse geometry-sensing surface/chest. We leverage the mechanical intelligence and tactile sensing of these modules to develop and demonstrate motion primitives for whole-body grasping control. We evaluate the hardware's effectiveness in achieving grasps of varying strengths over a variety of large domestic objects. Our results demonstrate the importance of exploiting softness and tactile sensing in contact-rich manipulation strategies, as well as a path forward for whole-body force-controlled interactions with the world.
SEED: Series Elastic End Effectors in 6D for Visuotactile Tool Use
Nov 02, 2021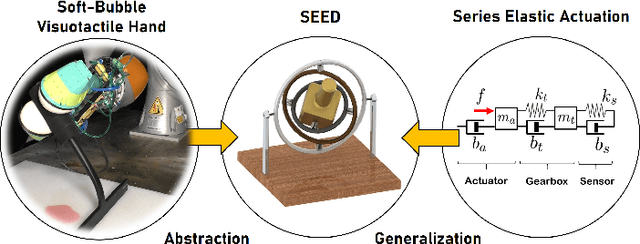
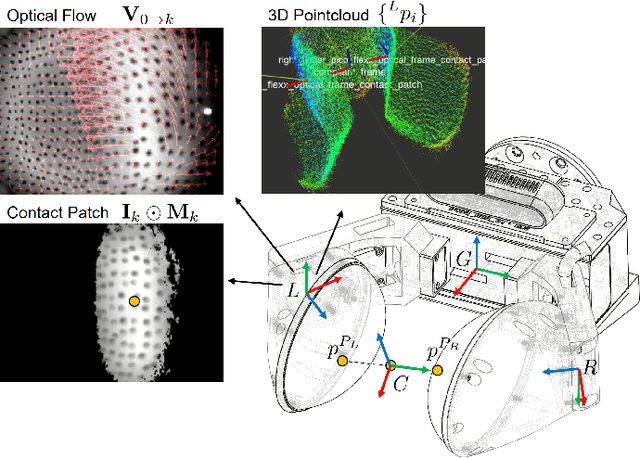
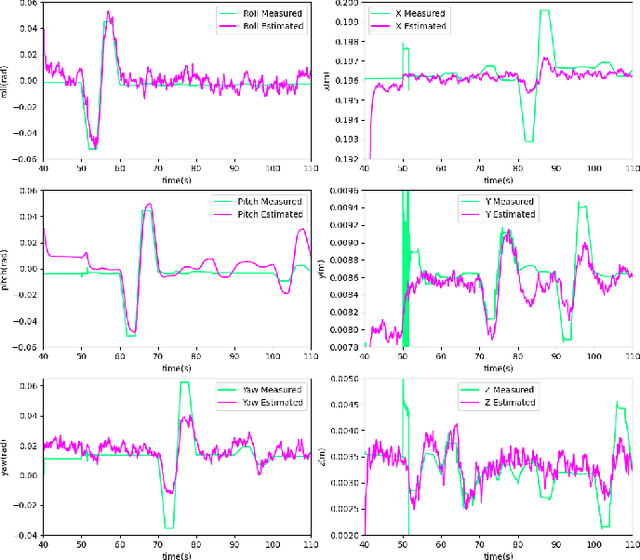
We propose the framework of Series Elastic End Effectors in 6D (SEED), which combines a spatially compliant element with visuotactile sensing to grasp and manipulate tools in the wild. Our framework generalizes the benefits of series elasticity to 6-dof, while providing an abstraction of control using visuotactile sensing. We propose an algorithm for relative pose estimation from visuotactile sensing, and a spatial hybrid force-position controller capable of achieving stable force interaction with the environment. We demonstrate the effectiveness of our framework on tools that require regulation of spatial forces. Video link: https://youtu.be/2-YuIfspDrk
Variable compliance and geometry regulation of Soft-Bubble grippers with active pressure control
Mar 15, 2021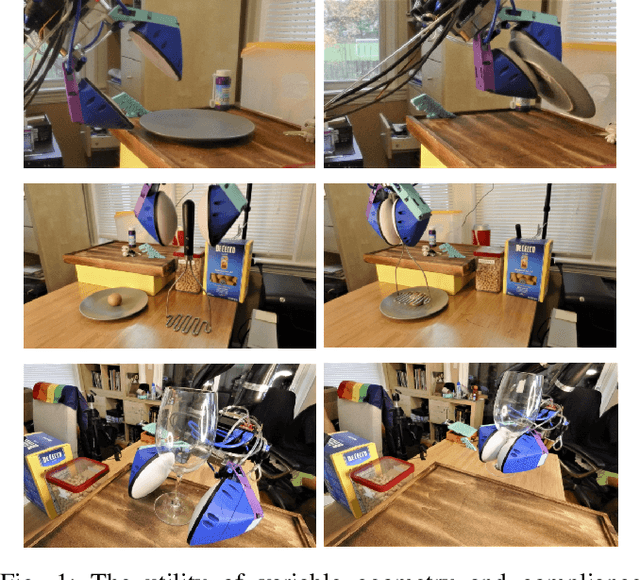
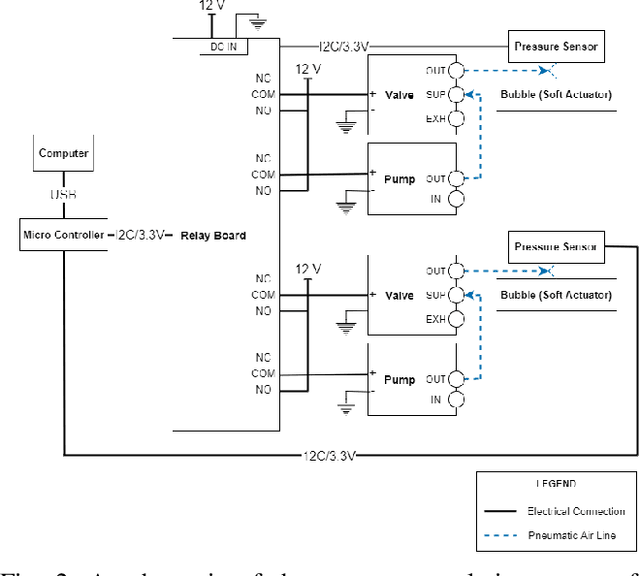
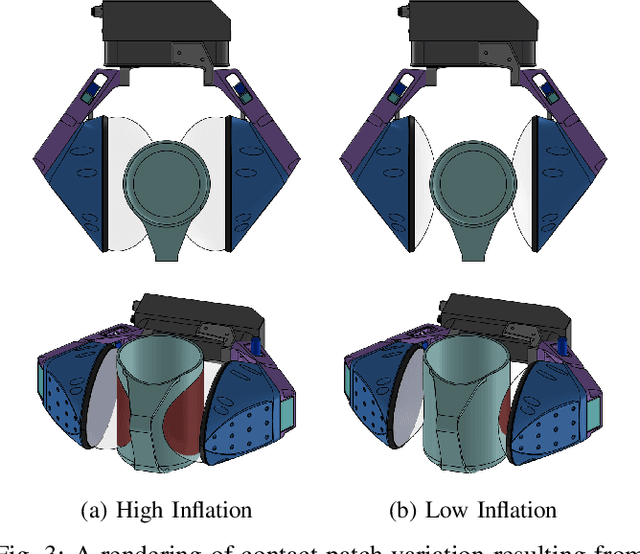
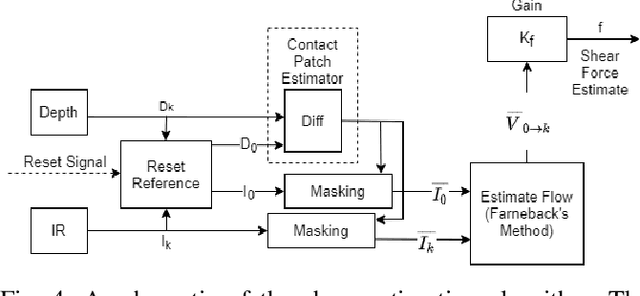
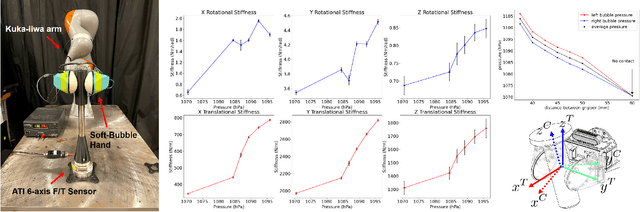
While compliant grippers have become increasingly commonplace in robot manipulation, finding the right stiffness and geometry for grasping the widest variety of objects remains a key challenge. Adjusting both stiffness and gripper geometry on the fly may provide the versatility needed to manipulate the large range of objects found in domestic environments. We present a system for actively controlling the geometry (inflation level) and compliance of Soft-bubble grippers - air filled, highly compliant parallel gripper fingers incorporating visuotactile sensing. The proposed system enables large, controlled changes in gripper finger geometry and grasp stiffness, as well as simple in-hand manipulation. We also demonstrate, despite these changes, the continued viability of advanced perception capabilities such as dense geometry and shear force measurement - we present a straightforward extension of our previously presented approach for measuring shear induced displacements using the internal imaging sensor and taking into account pressure and geometry changes. We quantify the controlled variation of grasp-free geometry, grasp stiffness and contact patch geometry resulting from pressure regulation and we demonstrate new capabilities for the gripper in the home by grasping in constrained spaces, manipulating tools requiring lower and higher stiffness grasps, as well as contact patch modulation.
Monocular Depth Estimation for Soft Visuotactile Sensors
Jan 05, 2021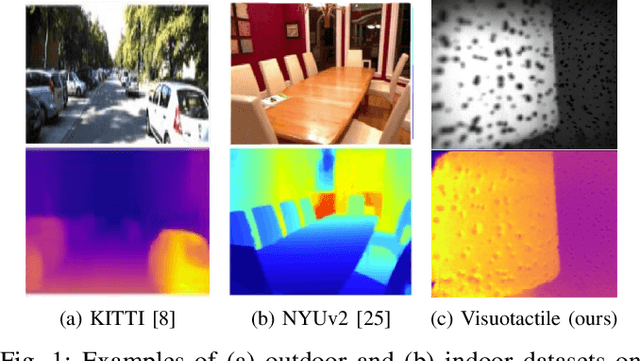
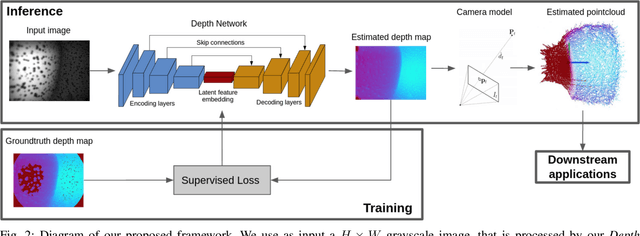
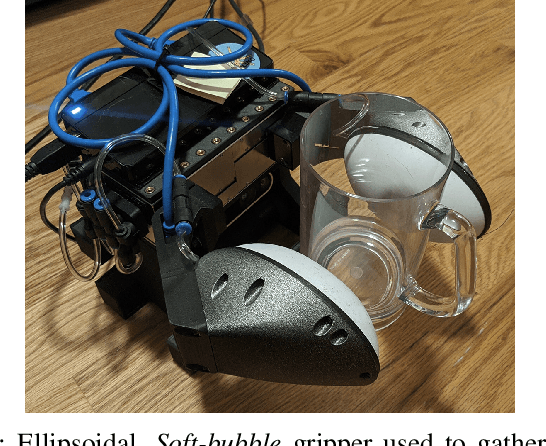
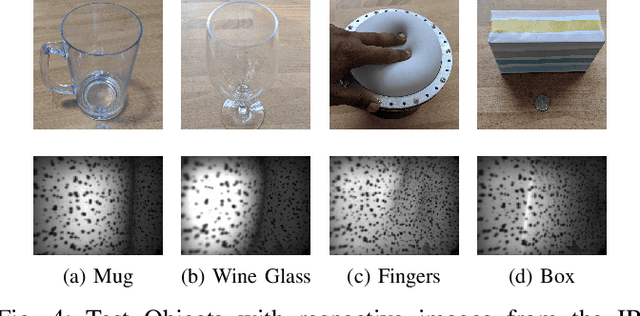
Fluid-filled soft visuotactile sensors such as the Soft-bubbles alleviate key challenges for robust manipulation, as they enable reliable grasps along with the ability to obtain high-resolution sensory feedback on contact geometry and forces. Although they are simple in construction, their utility has been limited due to size constraints introduced by enclosed custom IR/depth imaging sensors to directly measure surface deformations. Towards mitigating this limitation, we investigate the application of state-of-the-art monocular depth estimation to infer dense internal (tactile) depth maps directly from the internal single small IR imaging sensor. Through real-world experiments, we show that deep networks typically used for long-range depth estimation (1-100m) can be effectively trained for precise predictions at a much shorter range (1-100mm) inside a mostly textureless deformable fluid-filled sensor. We propose a simple supervised learning process to train an object-agnostic network requiring less than 10 random poses in contact for less than 10 seconds for a small set of diverse objects (mug, wine glass, box, and fingers in our experiments). We show that our approach is sample-efficient, accurate, and generalizes across different objects and sensor configurations unseen at training time. Finally, we discuss the implications of our approach for the design of soft visuotactile sensors and grippers.
Soft-Bubble grippers for robust and perceptive manipulation
Apr 28, 2020
Manipulation in cluttered environments like homes requires stable grasps, precise placement and robustness against external contact. We present the Soft-Bubble gripper system with a highly compliant gripping surface and dense-geometry visuotactile sensing, capable of multiple kinds of tactile perception. We first present various mechanical design advances and a fabrication technique to deposit custom patterns to the internal surface of the sensor that enable tracking of shear-induced displacement of the manipuland. The depth maps output by the internal imaging sensor are used in an in-hand proximity pose estimation framework -- the method better captures distances to corners or edges on the manipuland geometry. We also extend our previous work on tactile classification and integrate the system within a robust manipulation pipeline for cluttered home environments. The capabilities of the proposed system are demonstrated through robust execution multiple real-world manipulation tasks. A video of the system in action can be found here: [https://youtu.be/G_wBsbQyBfc].
A Transition-Aware Method for the Simulation of Compliant Contact with Regularized Friction
Sep 17, 2019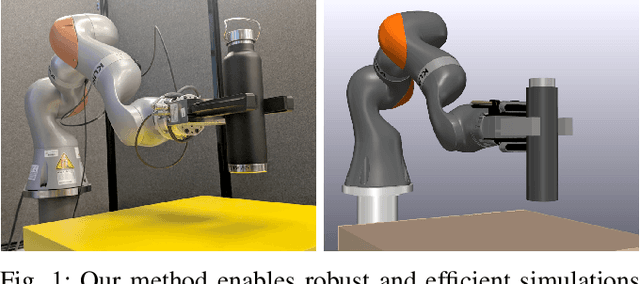

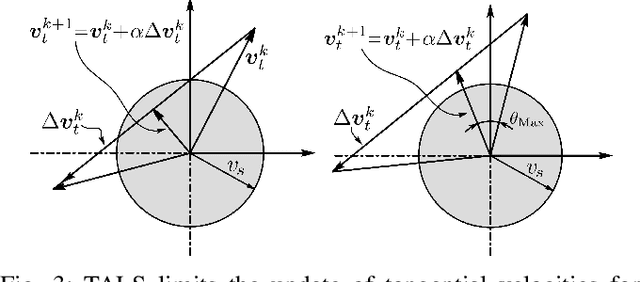
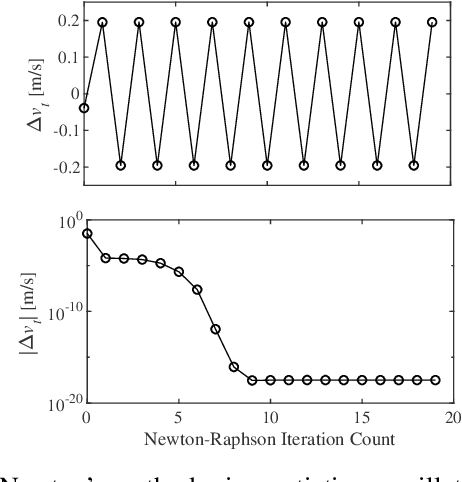
Multibody simulation with frictional contact has been a challenging subject of research for the past thirty years. Rigid-body assumptions are commonly used to approximate the physics of contact, and together with Coulomb friction, lead to challenging-to-solve nonlinear complementarity problems (NCP). On the other hand, robot grippers often introduce significant compliance. Compliant contact, combined with regularized friction, can be modeled entirely with ODEs, avoiding NCP solves. Unfortunately, regularized friction introduces high-frequency stiff dynamics and even implicit methods struggle with these systems, especially during slip-stick transitions. To improve the performance of implicit integration for these systems we introduce a Transition-Aware Line Search (TALS), which greatly improves the convergence of the Newton-Raphson iterations performed by implicit integrators. We find that TALS works best with semi-implicit integration, but that the explicit treatment of normal compliance can be problematic. To address this, we develop a Transition-Aware Modified Semi-Implicit (TAMSI) integrator that has similar computational cost to semi-implicit methods but implicitly couples compliant contact forces, leading to a more robust method. We evaluate the robustness, accuracy and performance of TAMSI and demonstrate our approach alongside a sim-to-real manipulation task.
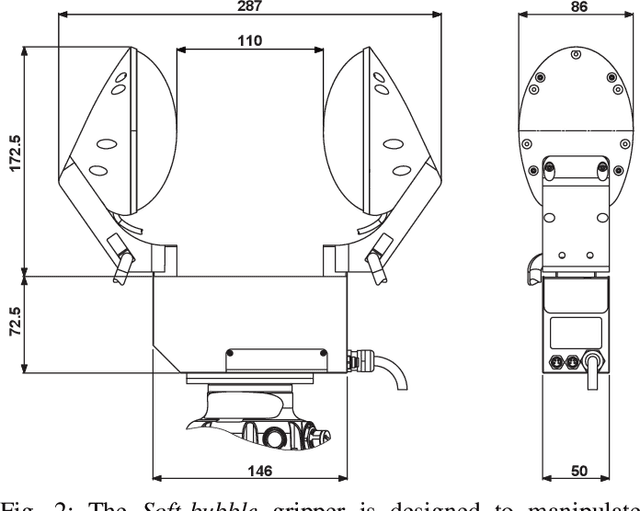
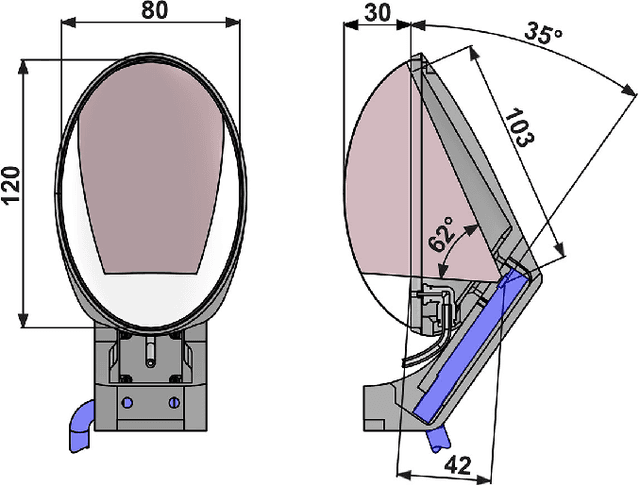
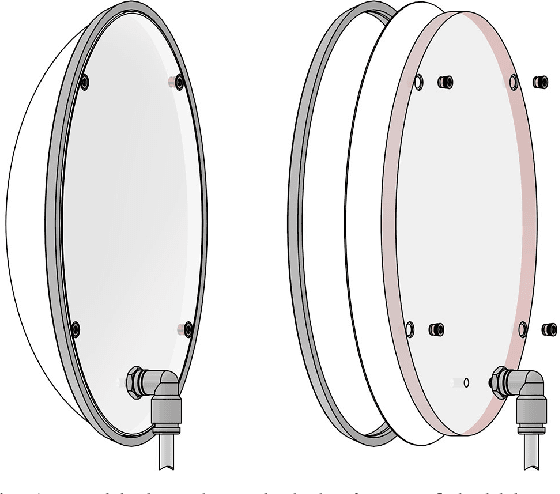
Soft-bubble: A highly compliant dense geometry tactile sensor for robot manipulation
Apr 03, 2019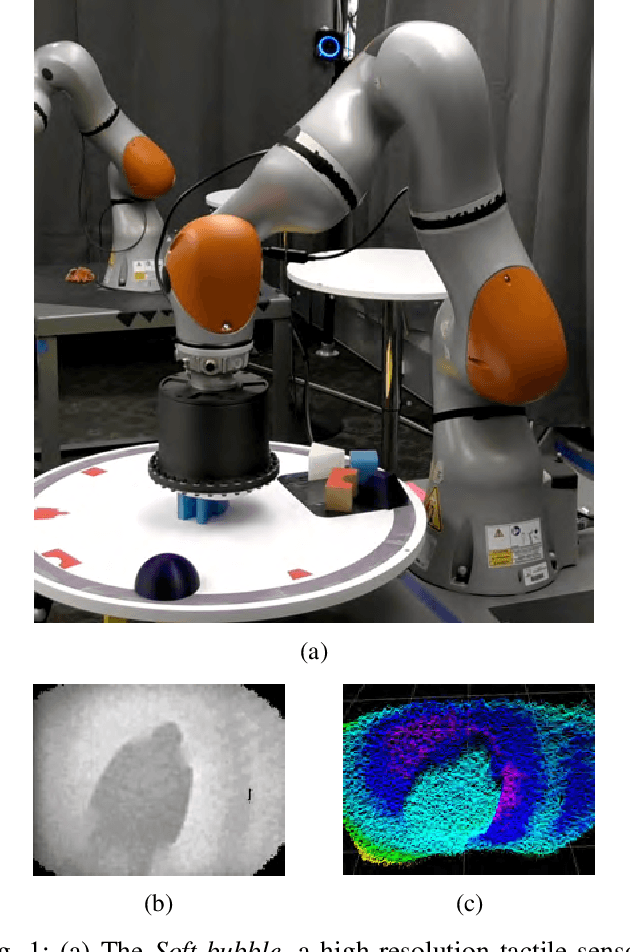
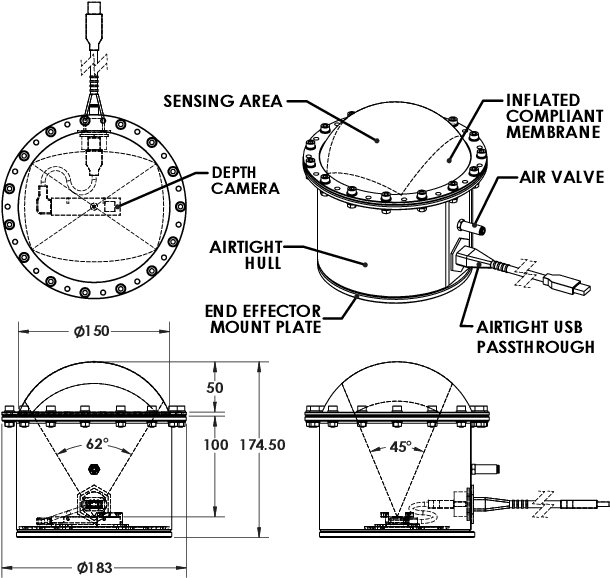

Incorporating effective tactile sensing and mechanical compliance is key towards enabling robust and safe operation of robots in unknown, uncertain and cluttered environments. Towards realizing this goal, we present a lightweight, easy-to-build, highly compliant dense geometry sensor and end effector that comprises an inflated latex membrane with a depth sensor behind it. We present the motivations and the hardware design for this Soft-bubble and demonstrate its capabilities through example tasks including tactile-object classification, pose estimation and tracking, and nonprehensile object manipulation. We also present initial experiments to show the importance of high-resolution geometry sensing for tactile tasks and discuss applications in robust manipulation.