 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePunyo-1: Soft tactile-sensing upper-body robot for large object manipulation and physical human interaction
Nov 17, 2021



The manipulation of large objects and the ability to safely operate in the vicinity of humans are key capabilities of a general purpose domestic robotic assistant. We present the design of a soft, tactile-sensing humanoid upper-body robot and demonstrate whole-body rich-contact manipulation strategies for handling large objects. We demonstrate our hardware design philosophy for outfitting off-the-shelf hard robot arms and other upper-body components with soft tactile-sensing modules, including: (i) low-cost, cut-resistant, contact pressure localizing coverings for the arms, (ii) paws based on TRI's Soft-bubble sensors for the end effectors, and (iii) compliant force/geometry sensors for the coarse geometry-sensing surface/chest. We leverage the mechanical intelligence and tactile sensing of these modules to develop and demonstrate motion primitives for whole-body grasping control. We evaluate the hardware's effectiveness in achieving grasps of varying strengths over a variety of large domestic objects. Our results demonstrate the importance of exploiting softness and tactile sensing in contact-rich manipulation strategies, as well as a path forward for whole-body force-controlled interactions with the world.
SPRK: A Low-Cost Stewart Platform For Motion Study In Surgical Robotics
Dec 08, 2017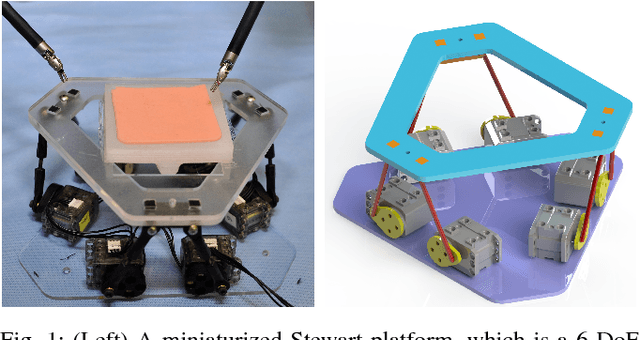
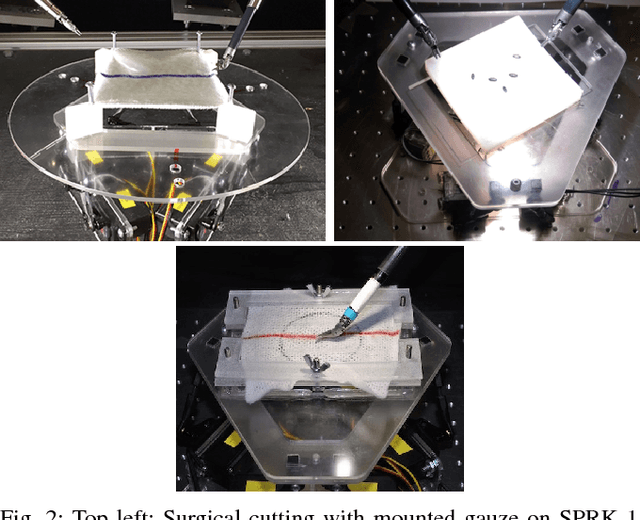
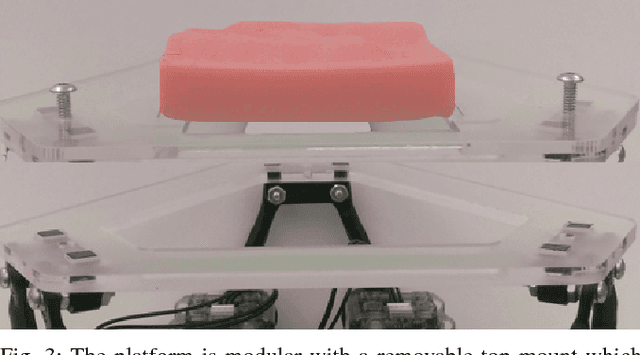
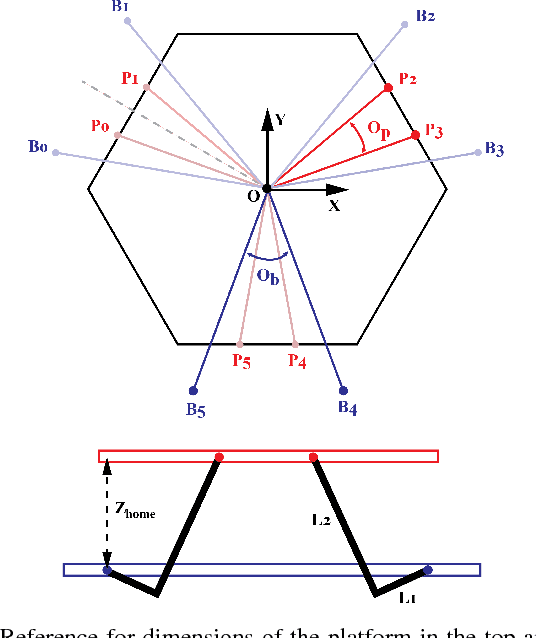
To simulate body organ motion due to breathing, heart beats, or peristaltic movements, we designed a low-cost, miniaturized SPRK (Stewart Platform Research Kit) to translate and rotate phantom tissue. This platform is 20cm x 20cm x 10cm to fit in the workspace of a da Vinci Research Kit (DVRK) surgical robot and costs $250, two orders of magnitude less than a commercial Stewart platform. The platform has a range of motion of +/- 1.27 cm in translation along x, y, and z directions and has motion modes for sinusoidal motion and breathing-inspired motion. Modular platform mounts were also designed for pattern cutting and debridement experiments. The platform's positional controller has a time-constant of 0.2 seconds and the root-mean-square error is 1.22 mm, 1.07 mm, and 0.20 mm in x, y, and z directions respectively. All the details, CAD models, and control software for the platform is available at github.com/BerkeleyAutomation/sprk.
Using Intermittent Synchronization to Compensate for Rhythmic Body Motion During Autonomous Surgical Cutting and Debridement
Dec 08, 2017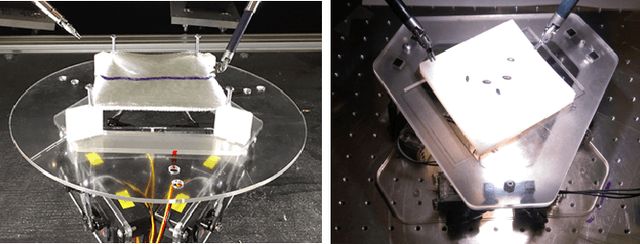
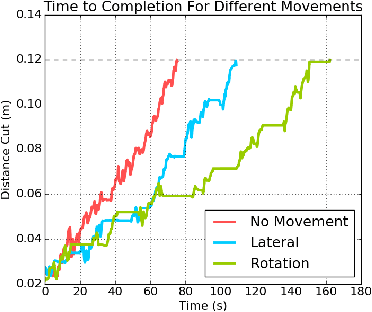
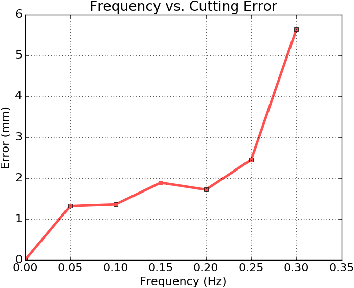

Anatomical structures are rarely static during a surgical procedure due to breathing, heartbeats, and peristaltic movements. Inspired by observing an expert surgeon, we propose an intermittent synchronization with the extrema of the rhythmic motion (i.e., the lowest velocity windows). We performed 2 experiments: (1) pattern cutting, and (2) debridement. In (1), we found that the intermittent synchronization approach, while 1.8x slower than tracking motion, was significantly more robust to noise and control latency, and it reduced the max cutting error by 2.6x In (2), a baseline approach with no synchronization achieves 62% success rate for each removal, while intermittent synchronization achieves 80%.