 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPRK: A Low-Cost Stewart Platform For Motion Study In Surgical Robotics
Paper and Code
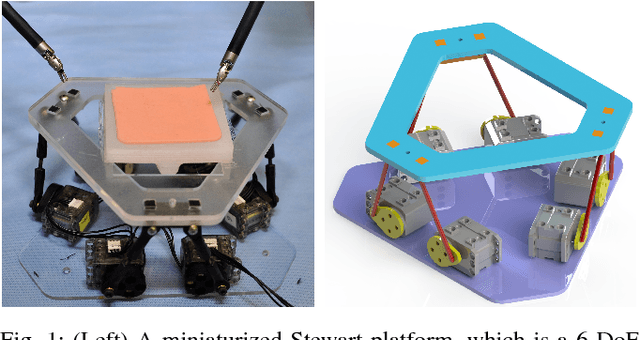
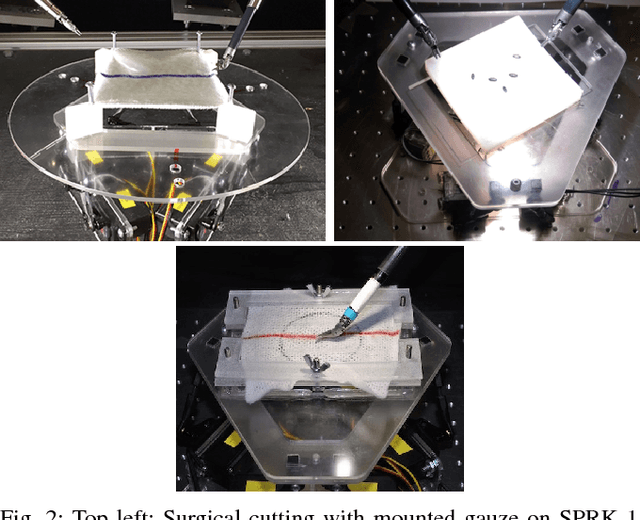
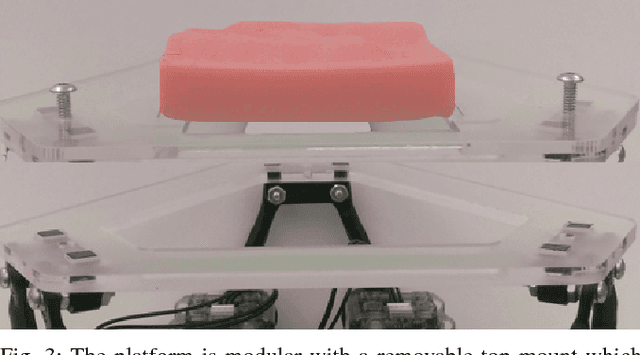
To simulate body organ motion due to breathing, heart beats, or peristaltic movements, we designed a low-cost, miniaturized SPRK (Stewart Platform Research Kit) to translate and rotate phantom tissue. This platform is 20cm x 20cm x 10cm to fit in the workspace of a da Vinci Research Kit (DVRK) surgical robot and costs $250, two orders of magnitude less than a commercial Stewart platform. The platform has a range of motion of +/- 1.27 cm in translation along x, y, and z directions and has motion modes for sinusoidal motion and breathing-inspired motion. Modular platform mounts were also designed for pattern cutting and debridement experiments. The platform's positional controller has a time-constant of 0.2 seconds and the root-mean-square error is 1.22 mm, 1.07 mm, and 0.20 mm in x, y, and z directions respectively. All the details, CAD models, and control software for the platform is available at github.com/BerkeleyAutomation/sprk.