 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Demonstration of Smart Doorbell Design Using Federated Deep Learning
Oct 19, 2020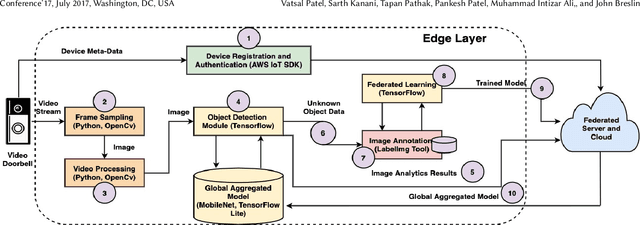
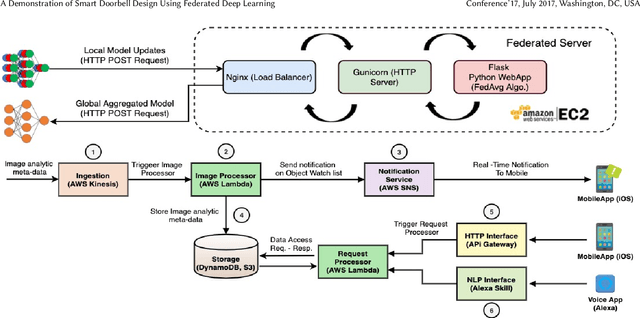
Smart doorbells have been playing an important role in protecting our modern homes. Existing approaches of sending video streams to a centralized server (or Cloud) for video analytics have been facing many challenges such as latency, bandwidth cost and more importantly users' privacy concerns. To address these challenges, this paper showcases the ability of an intelligent smart doorbell based on Federated Deep Learning, which can deploy and manage video analytics applications such as a smart doorbell across Edge and Cloud resources. This platform can scale, work with multiple devices, seamlessly manage online orchestration of the application components. The proposed framework is implemented using state-of-the-art technology. We implement the Federated Server using the Flask framework, containerized using Nginx and Gunicorn, which is deployed on AWS EC2 and AWS Serverless architecture.
Demonstration of a Cloud-based Software Framework for Video Analytics Application using Low-Cost IoT Devices
Sep 29, 2020
The design of products and services such as a Smart doorbell, demonstrating video analytics software/algorithm functionality, is expected to address a new kind of requirements such as designing a scalable solution while considering the trade-off between cost and accuracy; a flexible architecture to deploy new AI-based models or update existing models, as user requirements evolve; as well as seamlessly integrating different kinds of user interfaces and devices. To address these challenges, we propose a smart doorbell that orchestrates video analytics across Edge and Cloud resources. The proposal uses AWS as a base platform for implementation and leverages Commercially Available Off-The-Shelf(COTS) affordable devices such as Raspberry Pi in the form of an Edge device.
SPRK: A Low-Cost Stewart Platform For Motion Study In Surgical Robotics
Dec 08, 2017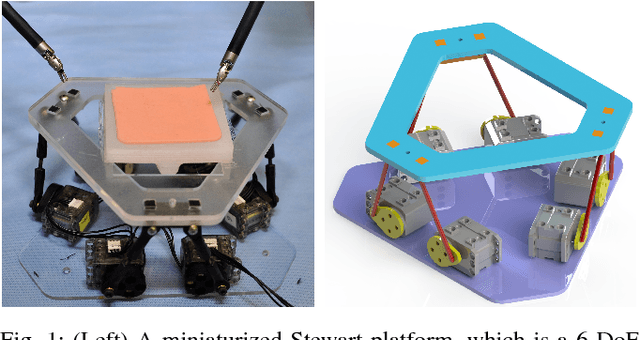
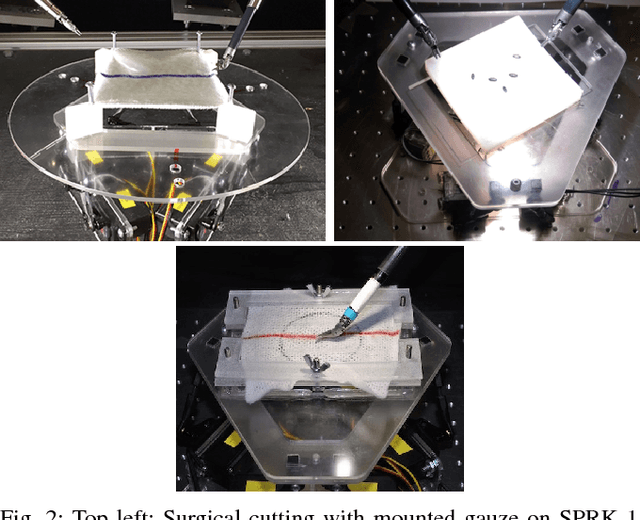
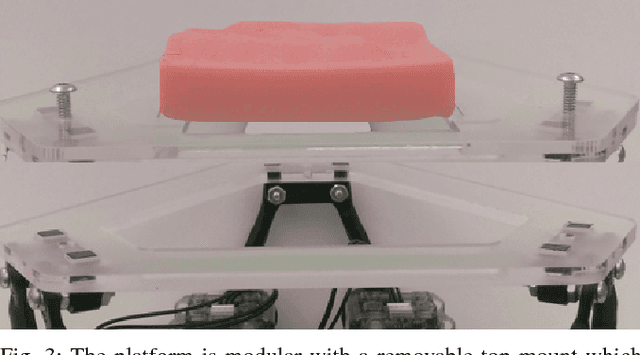
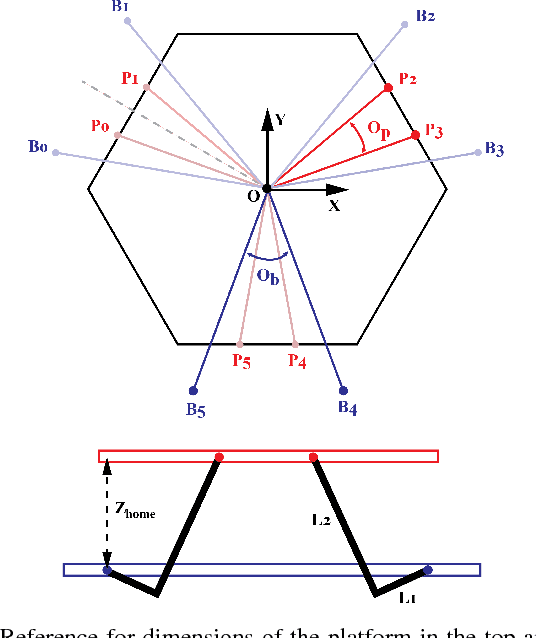
To simulate body organ motion due to breathing, heart beats, or peristaltic movements, we designed a low-cost, miniaturized SPRK (Stewart Platform Research Kit) to translate and rotate phantom tissue. This platform is 20cm x 20cm x 10cm to fit in the workspace of a da Vinci Research Kit (DVRK) surgical robot and costs $250, two orders of magnitude less than a commercial Stewart platform. The platform has a range of motion of +/- 1.27 cm in translation along x, y, and z directions and has motion modes for sinusoidal motion and breathing-inspired motion. Modular platform mounts were also designed for pattern cutting and debridement experiments. The platform's positional controller has a time-constant of 0.2 seconds and the root-mean-square error is 1.22 mm, 1.07 mm, and 0.20 mm in x, y, and z directions respectively. All the details, CAD models, and control software for the platform is available at github.com/BerkeleyAutomation/sprk.
Using Intermittent Synchronization to Compensate for Rhythmic Body Motion During Autonomous Surgical Cutting and Debridement
Dec 08, 2017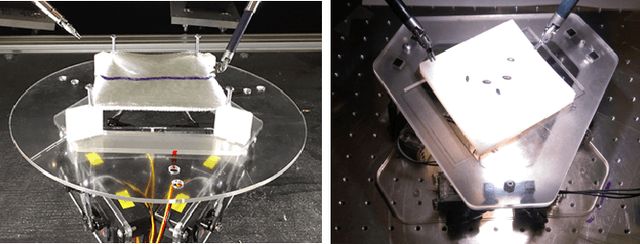
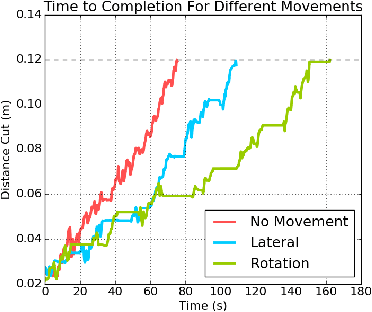
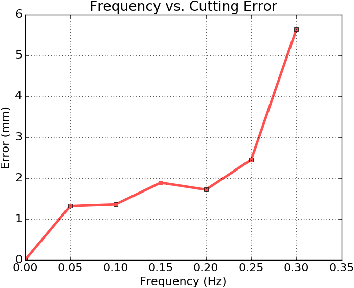

Anatomical structures are rarely static during a surgical procedure due to breathing, heartbeats, and peristaltic movements. Inspired by observing an expert surgeon, we propose an intermittent synchronization with the extrema of the rhythmic motion (i.e., the lowest velocity windows). We performed 2 experiments: (1) pattern cutting, and (2) debridement. In (1), we found that the intermittent synchronization approach, while 1.8x slower than tracking motion, was significantly more robust to noise and control latency, and it reduced the max cutting error by 2.6x In (2), a baseline approach with no synchronization achieves 62% success rate for each removal, while intermittent synchronization achieves 80%.