Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Intermittent Synchronization to Compensate for Rhythmic Body Motion During Autonomous Surgical Cutting and Debridement
Dec 08, 2017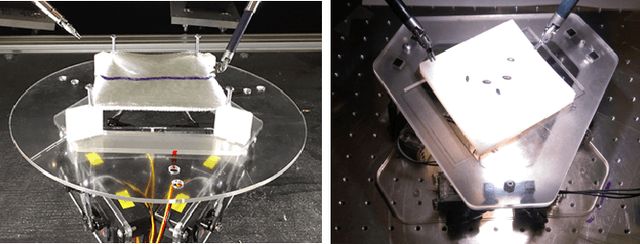
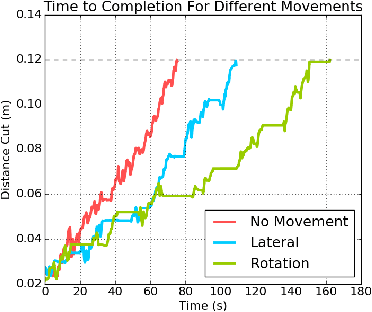
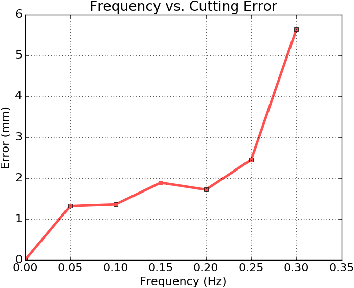

Anatomical structures are rarely static during a surgical procedure due to breathing, heartbeats, and peristaltic movements. Inspired by observing an expert surgeon, we propose an intermittent synchronization with the extrema of the rhythmic motion (i.e., the lowest velocity windows). We performed 2 experiments: (1) pattern cutting, and (2) debridement. In (1), we found that the intermittent synchronization approach, while 1.8x slower than tracking motion, was significantly more robust to noise and control latency, and it reduced the max cutting error by 2.6x In (2), a baseline approach with no synchronization achieves 62% success rate for each removal, while intermittent synchronization achieves 80%.
Via