 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSENSE: Abstraction-Based Synthesis of Networked Control Systems
Jun 26, 2018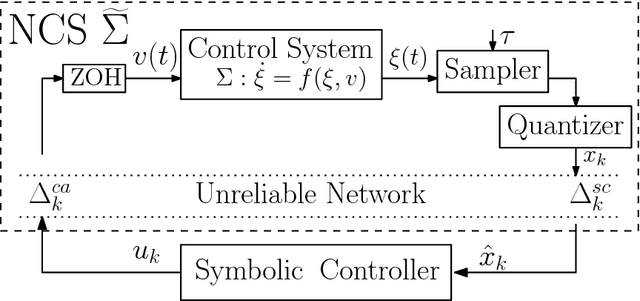
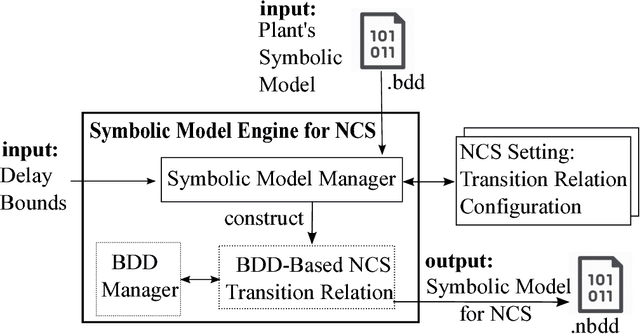
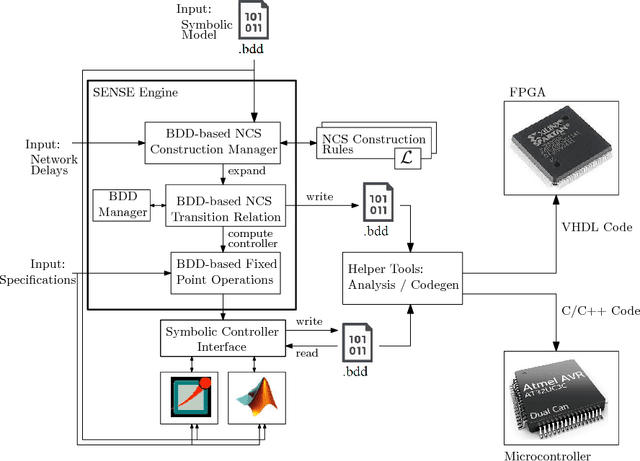
While many studies and tools target the basic stabilizability problem of networked control systems (NCS), nowadays modern systems require more sophisticated objectives such as those expressed as formulae in linear temporal logic or as automata on infinite strings. One general technique to achieve this is based on so-called symbolic models, where complex systems are approximated by finite abstractions, and then, correct-by-construction controllers are automatically synthesized for them. We present tool SENSE for the construction of finite abstractions for NCS and the automated synthesis of controllers. Constructed controllers enforce complex specifications over plants in NCS by taking into account several non-idealities of the communication channels. Given a symbolic model of the plant and network parameters, SENSE can efficiently construct a symbolic model of the NCS, by employing operations on binary decision diagrams (BDDs). Then, it synthesizes symbolic controllers satisfying a class of specifications. It has interfaces for the simulation and the visualization of the resulting closed-loop systems using OMNETPP and MATLAB. Additionally, SENSE can generate ready-to-implement VHDL/Verilog or C/C++ codes from the synthesized controllers.
* In Proceedings MeTRiD 2018, arXiv:1806.09330
Dynamics-Based Reactive Synthesis and Automated Revisions for High-Level Robot Control
Jan 13, 2016
The aim of this work is to address issues where formal specifications cannot be realized on a given dynamical system subjected to a changing environment. Such failures occur whenever the dynamics of the system restrict the robot in such a way that the environment may prevent the robot from progressing safely to its goals. We provide a framework that automatically synthesizes revisions to such specifications that restrict the assumed behaviors of the environment and the behaviors of the system. We provide a means for explaining such modifications to the user in a concise, easy-to-understand manner. Integral to the framework is a new algorithm for synthesizing controllers for reactive specifications that include a discrete representation of the robot's dynamics. The new approach is demonstrated with a complex task implemented using a unicycle model.