 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Multi-Agent Coordination at Unsignalized Intersections via Topological Inference
Paper and Code
Apr 10, 2020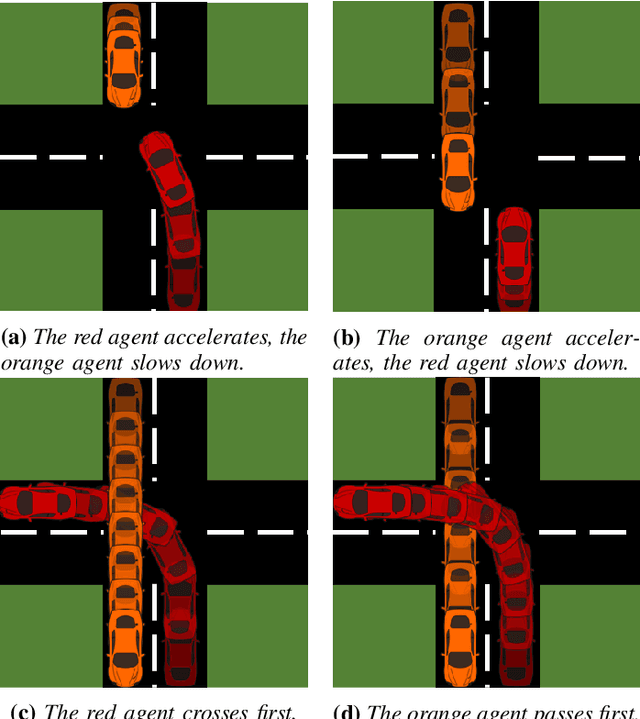
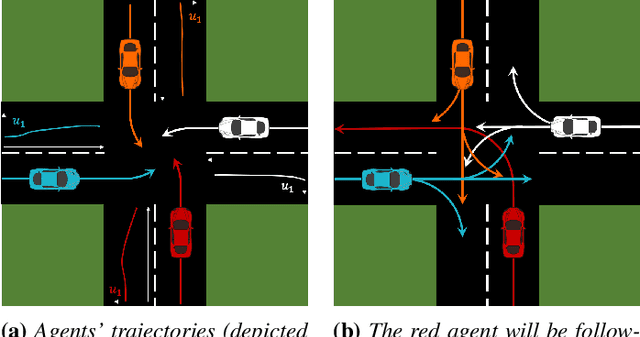
We focus on scenarios in which multiple rational, non-communicating agents navigate in close proximity, such as unsignalized street intersections. In these situations, decentralized coordination to achieve safe and efficient motion demands nuanced implicit communication between the agents. Often, the spatial structure of such environments constrains multi-agent trajectories to belong to a finite set of modes, each corresponding to a distinct spatiotemporal topology. Our key insight is that empowering agents with a model of this structure can enable effective coordination through implicit communication, realized via intent signals encoded in agents' actions. In this paper, we do so by representing modes of joint behavior as topological braids. We design a decentralized planning framework that incorporates a mechanism for inferring the emerging braid in the decision-making process. By executing actions that minimize the uncertainty over the upcoming braid, agents converge rapidly to a consensus over a joint collision avoidance strategy despite lacking knowledge of the destinations of others and accurate models of their behaviors. We validate our approach with a case study in a four-way unsignalized intersection involving a series of challenging multi-agent scenarios. Our findings show that our model reduces frequency of collisions by at least 65% over a set of explicit trajectory prediction baselines, while maintaining comparable efficiency.