 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriveGPT: Scaling Autoregressive Behavior Models for Driving
Dec 19, 2024



We present DriveGPT, a scalable behavior model for autonomous driving. We model driving as a sequential decision making task, and learn a transformer model to predict future agent states as tokens in an autoregressive fashion. We scale up our model parameters and training data by multiple orders of magnitude, enabling us to explore the scaling properties in terms of dataset size, model parameters, and compute. We evaluate DriveGPT across different scales in a planning task, through both quantitative metrics and qualitative examples including closed-loop driving in complex real-world scenarios. In a separate prediction task, DriveGPT outperforms a state-of-the-art baseline and exhibits improved performance by pretraining on a large-scale dataset, further validating the benefits of data scaling.
ACRE: Abstract Causal REasoning Beyond Covariation
Mar 26, 2021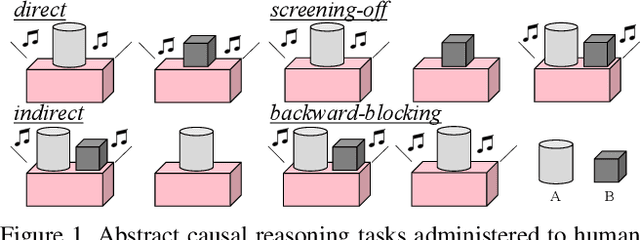

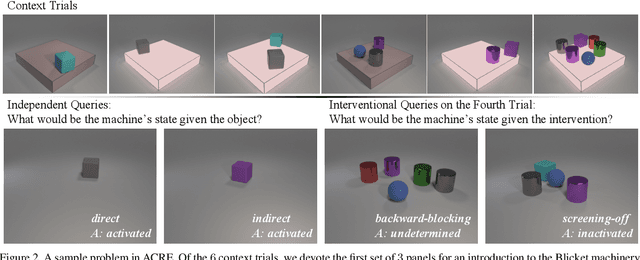
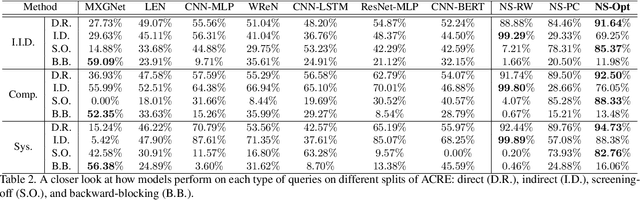
Causal induction, i.e., identifying unobservable mechanisms that lead to the observable relations among variables, has played a pivotal role in modern scientific discovery, especially in scenarios with only sparse and limited data. Humans, even young toddlers, can induce causal relationships surprisingly well in various settings despite its notorious difficulty. However, in contrast to the commonplace trait of human cognition is the lack of a diagnostic benchmark to measure causal induction for modern Artificial Intelligence (AI) systems. Therefore, in this work, we introduce the Abstract Causal REasoning (ACRE) dataset for systematic evaluation of current vision systems in causal induction. Motivated by the stream of research on causal discovery in Blicket experiments, we query a visual reasoning system with the following four types of questions in either an independent scenario or an interventional scenario: direct, indirect, screening-off, and backward-blocking, intentionally going beyond the simple strategy of inducing causal relationships by covariation. By analyzing visual reasoning architectures on this testbed, we notice that pure neural models tend towards an associative strategy under their chance-level performance, whereas neuro-symbolic combinations struggle in backward-blocking reasoning. These deficiencies call for future research in models with a more comprehensive capability of causal induction.
Dark, Beyond Deep: A Paradigm Shift to Cognitive AI with Humanlike Common Sense
Apr 20, 2020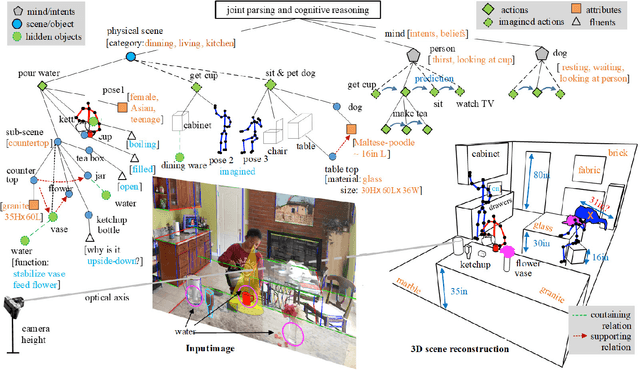
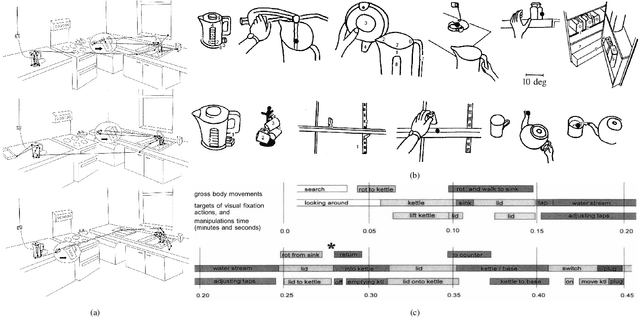
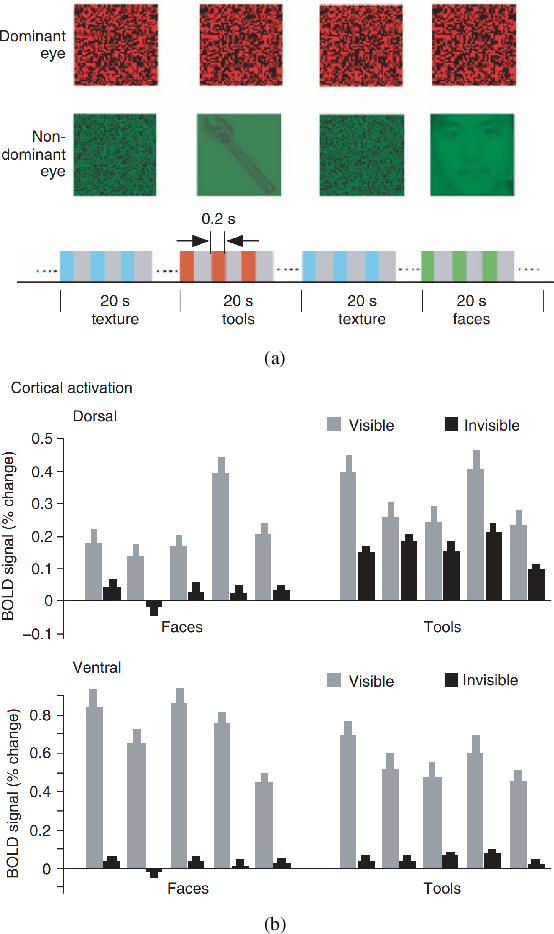
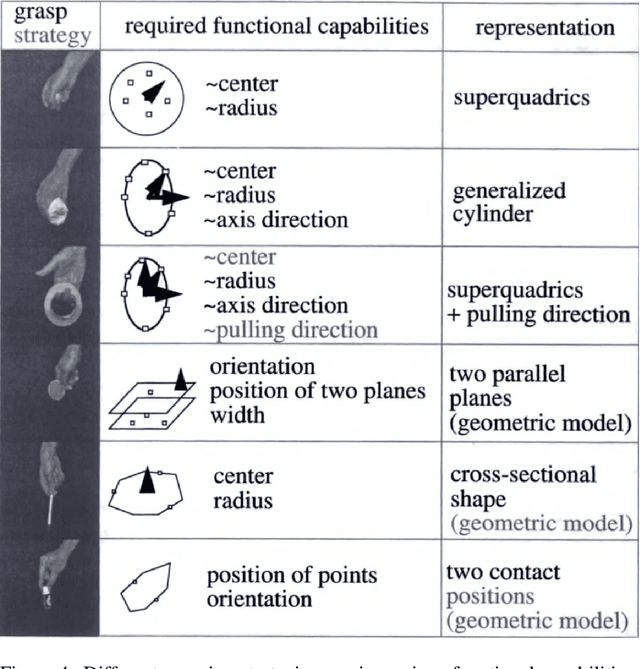
Recent progress in deep learning is essentially based on a "big data for small tasks" paradigm, under which massive amounts of data are used to train a classifier for a single narrow task. In this paper, we call for a shift that flips this paradigm upside down. Specifically, we propose a "small data for big tasks" paradigm, wherein a single artificial intelligence (AI) system is challenged to develop "common sense", enabling it to solve a wide range of tasks with little training data. We illustrate the potential power of this new paradigm by reviewing models of common sense that synthesize recent breakthroughs in both machine and human vision. We identify functionality, physics, intent, causality, and utility (FPICU) as the five core domains of cognitive AI with humanlike common sense. When taken as a unified concept, FPICU is concerned with the questions of "why" and "how", beyond the dominant "what" and "where" framework for understanding vision. They are invisible in terms of pixels but nevertheless drive the creation, maintenance, and development of visual scenes. We therefore coin them the "dark matter" of vision. Just as our universe cannot be understood by merely studying observable matter, we argue that vision cannot be understood without studying FPICU. We demonstrate the power of this perspective to develop cognitive AI systems with humanlike common sense by showing how to observe and apply FPICU with little training data to solve a wide range of challenging tasks, including tool use, planning, utility inference, and social learning. In summary, we argue that the next generation of AI must embrace "dark" humanlike common sense for solving novel tasks.
* For high quality figures, please refer to http://wellyzhang.github.io/attach/dark.pdf
Theory-based Causal Transfer: Integrating Instance-level Induction and Abstract-level Structure Learning
Nov 25, 2019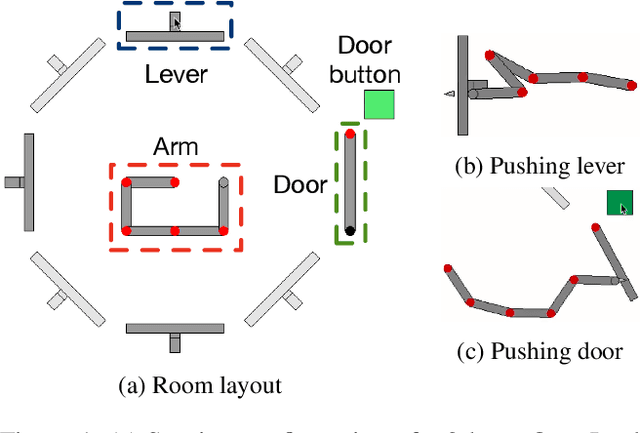
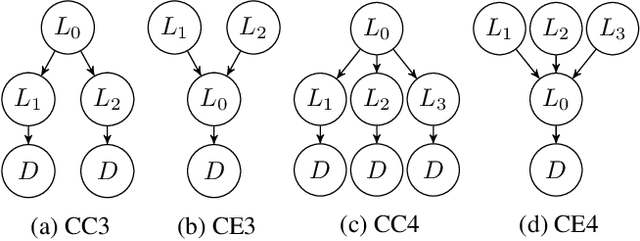
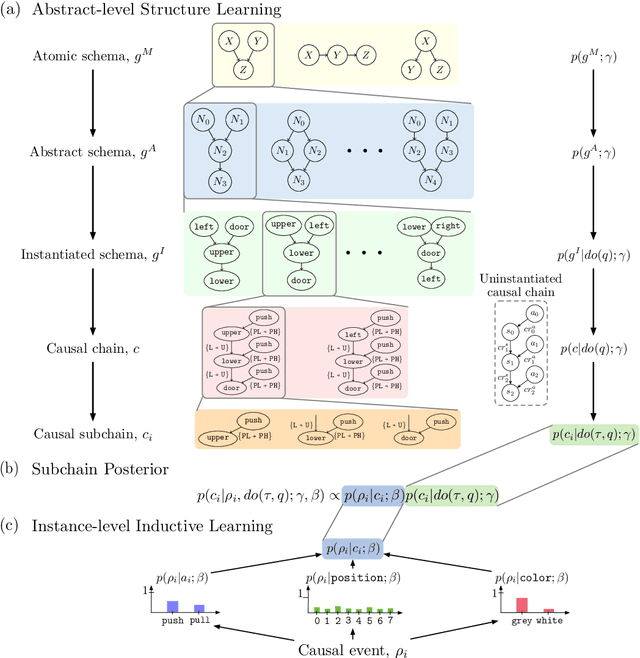
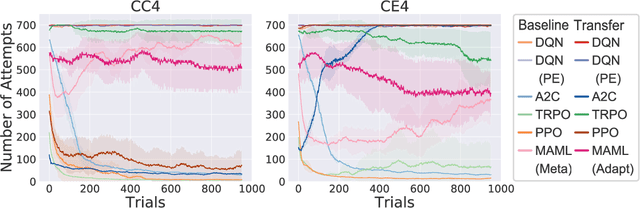
Learning transferable knowledge across similar but different settings is a fundamental component of generalized intelligence. In this paper, we approach the transfer learning challenge from a causal theory perspective. Our agent is endowed with two basic yet general theories for transfer learning: (i) a task shares a common abstract structure that is invariant across domains, and (ii) the behavior of specific features of the environment remain constant across domains. We adopt a Bayesian perspective of causal theory induction and use these theories to transfer knowledge between environments. Given these general theories, the goal is to train an agent by interactively exploring the problem space to (i) discover, form, and transfer useful abstract and structural knowledge, and (ii) induce useful knowledge from the instance-level attributes observed in the environment. A hierarchy of Bayesian structures is used to model abstract-level structural causal knowledge, and an instance-level associative learning scheme learns which specific objects can be used to induce state changes through interaction. This model-learning scheme is then integrated with a model-based planner to achieve a task in the OpenLock environment, a virtual ``escape room'' with a complex hierarchy that requires agents to reason about an abstract, generalized causal structure. We compare performances against a set of predominate model-free reinforcement learning(RL) algorithms. RL agents showed poor ability transferring learned knowledge across different trials. Whereas the proposed model revealed similar performance trends as human learners, and more importantly, demonstrated transfer behavior across trials and learning situations.