 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable deep learning improves human mental models of self-driving cars
Nov 27, 2024Self-driving cars increasingly rely on deep neural networks to achieve human-like driving. However, the opacity of such black-box motion planners makes it challenging for the human behind the wheel to accurately anticipate when they will fail, with potentially catastrophic consequences. Here, we introduce concept-wrapper network (i.e., CW-Net), a method for explaining the behavior of black-box motion planners by grounding their reasoning in human-interpretable concepts. We deploy CW-Net on a real self-driving car and show that the resulting explanations refine the human driver's mental model of the car, allowing them to better predict its behavior and adjust their own behavior accordingly. Unlike previous work using toy domains or simulations, our study presents the first real-world demonstration of how to build authentic autonomous vehicles (AVs) that give interpretable, causally faithful explanations for their decisions, without sacrificing performance. We anticipate our method could be applied to other safety-critical systems with a human in the loop, such as autonomous drones and robotic surgeons. Overall, our study suggests a pathway to explainability for autonomous agents as a whole, which can help make them more transparent, their deployment safer, and their usage more ethical.
Lab2Car: A Versatile Wrapper for Deploying Experimental Planners in Complex Real-world Environments
Sep 14, 2024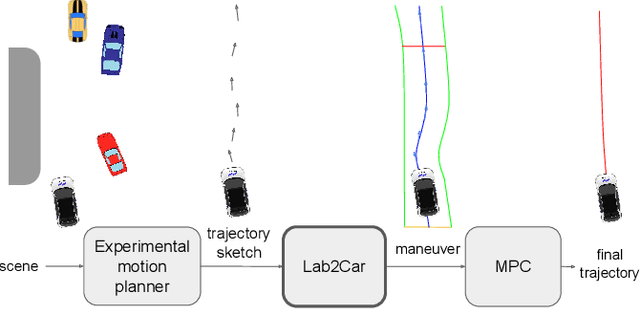
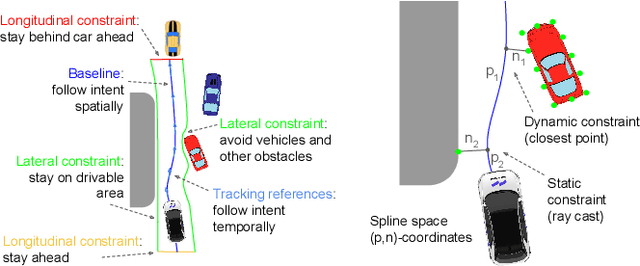
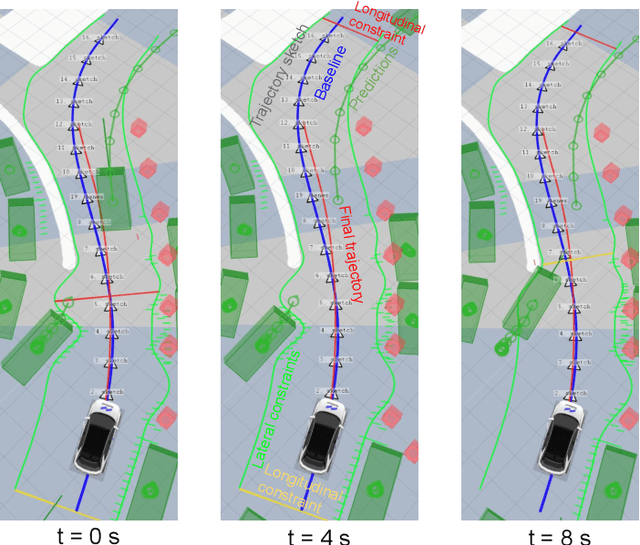
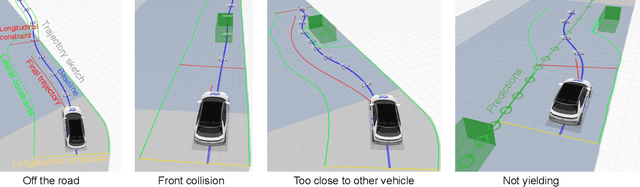
Human-level autonomous driving is an ever-elusive goal, with planning and decision making -- the cognitive functions that determine driving behavior -- posing the greatest challenge. Despite a proliferation of promising approaches, progress is stifled by the difficulty of deploying experimental planners in naturalistic settings. In this work, we propose Lab2Car, an optimization-based wrapper that can take a trajectory sketch from an arbitrary motion planner and convert it to a safe, comfortable, dynamically feasible trajectory that the car can follow. This allows motion planners that do not provide such guarantees to be safely tested and optimized in real-world environments. We demonstrate the versatility of Lab2Car by using it to deploy a machine learning (ML) planner and a search-based planner on self-driving cars in Las Vegas. The resulting systems handle challenging scenarios, such as cut-ins, overtaking, and yielding, in complex urban environments like casino pick-up/drop-off areas. Our work paves the way for quickly deploying and evaluating candidate motion planners in realistic settings, ensuring rapid iteration and accelerating progress towards human-level autonomy.
Predictive representations: building blocks of intelligence
Feb 09, 2024Adaptive behavior often requires predicting future events. The theory of reinforcement learning prescribes what kinds of predictive representations are useful and how to compute them. This paper integrates these theoretical ideas with work on cognition and neuroscience. We pay special attention to the successor representation (SR) and its generalizations, which have been widely applied both as engineering tools and models of brain function. This convergence suggests that particular kinds of predictive representations may function as versatile building blocks of intelligence.
Driving in Real Life with Inverse Reinforcement Learning
Jun 07, 2022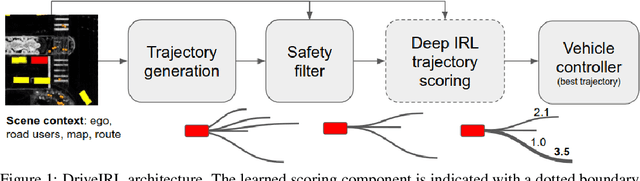

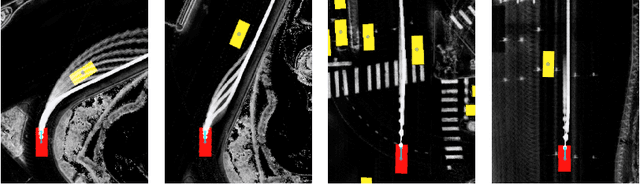
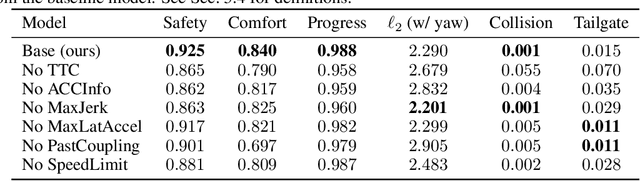
In this paper, we introduce the first learning-based planner to drive a car in dense, urban traffic using Inverse Reinforcement Learning (IRL). Our planner, DriveIRL, generates a diverse set of trajectory proposals, filters these trajectories with a lightweight and interpretable safety filter, and then uses a learned model to score each remaining trajectory. The best trajectory is then tracked by the low-level controller of our self-driving vehicle. We train our trajectory scoring model on a 500+ hour real-world dataset of expert driving demonstrations in Las Vegas within the maximum entropy IRL framework. DriveIRL's benefits include: a simple design due to only learning the trajectory scoring function, relatively interpretable features, and strong real-world performance. We validated DriveIRL on the Las Vegas Strip and demonstrated fully autonomous driving in heavy traffic, including scenarios involving cut-ins, abrupt braking by the lead vehicle, and hotel pickup/dropoff zones. Our dataset will be made public to help further research in this area.