 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLab2Car: A Versatile Wrapper for Deploying Experimental Planners in Complex Real-world Environments
Sep 14, 2024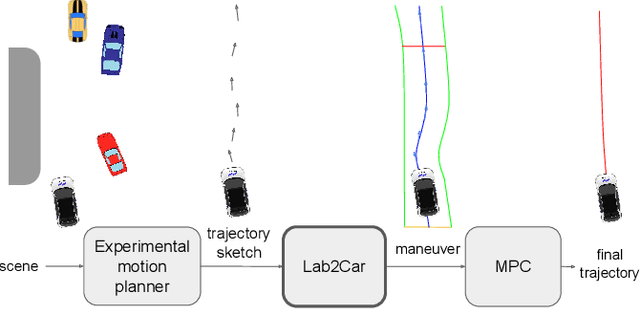
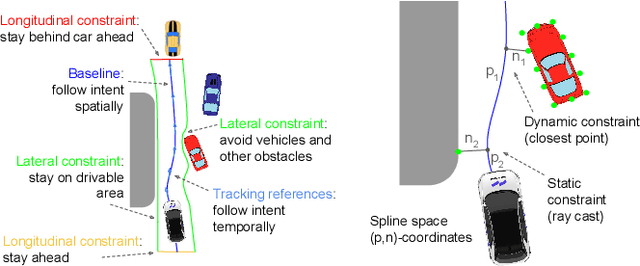
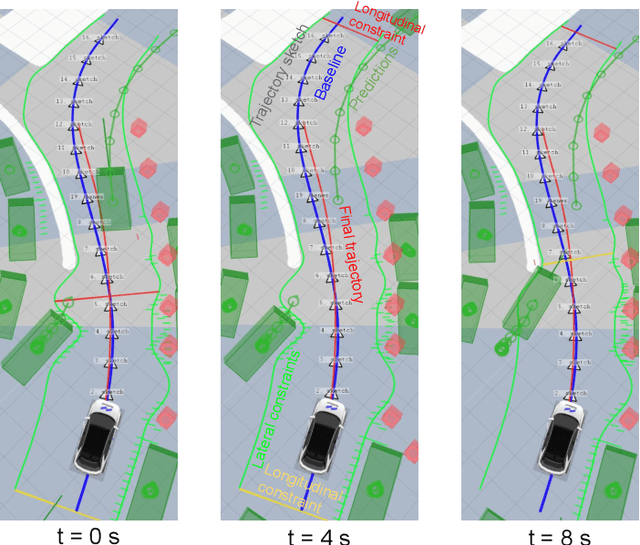
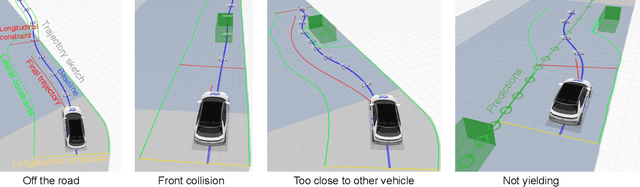
Human-level autonomous driving is an ever-elusive goal, with planning and decision making -- the cognitive functions that determine driving behavior -- posing the greatest challenge. Despite a proliferation of promising approaches, progress is stifled by the difficulty of deploying experimental planners in naturalistic settings. In this work, we propose Lab2Car, an optimization-based wrapper that can take a trajectory sketch from an arbitrary motion planner and convert it to a safe, comfortable, dynamically feasible trajectory that the car can follow. This allows motion planners that do not provide such guarantees to be safely tested and optimized in real-world environments. We demonstrate the versatility of Lab2Car by using it to deploy a machine learning (ML) planner and a search-based planner on self-driving cars in Las Vegas. The resulting systems handle challenging scenarios, such as cut-ins, overtaking, and yielding, in complex urban environments like casino pick-up/drop-off areas. Our work paves the way for quickly deploying and evaluating candidate motion planners in realistic settings, ensuring rapid iteration and accelerating progress towards human-level autonomy.