 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgenuReality: A VR environment for research of pedestrian and autonomous vehicle interactions
Jan 12, 2022


We present nuReality, a virtual reality 'VR' environment designed to test the efficacy of vehicular behaviors to communicate intent during interactions between autonomous vehicles 'AVs' and pedestrians at urban intersections. In this project we focus on expressive behaviors as a means for pedestrians to readily recognize the underlying intent of the AV's movements. VR is an ideal tool to use to test these situations as it can be immersive and place subjects into these potentially dangerous scenarios without risk. nuReality provides a novel and immersive virtual reality environment that includes numerous visual details (road and building texturing, parked cars, swaying tree limbs) as well as auditory details (birds chirping, cars honking in the distance, people talking). In these files we present the nuReality environment, its 10 unique vehicle behavior scenarios, and the Unreal Engine and Autodesk Maya source files for each scenario. The files are publicly released as open source at www.nuReality.org, to support the academic community studying the critical AV-pedestrian interaction.
Motion Prediction using Trajectory Sets and Self-Driving Domain Knowledge
Jun 08, 2020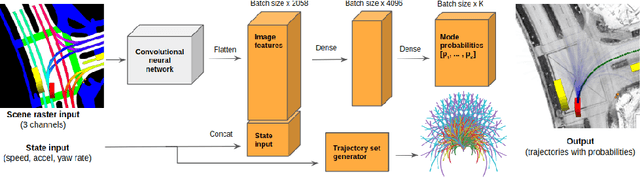

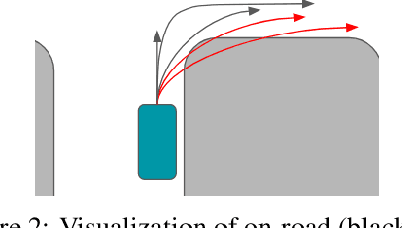

Predicting the future motion of vehicles has been studied using various techniques, including stochastic policies, generative models, and regression. Recent work has shown that classification over a trajectory set, which approximates possible motions, achieves state-of-the-art performance and avoids issues like mode collapse. However, map information and the physical relationships between nearby trajectories is not fully exploited in this formulation. We build on classification-based approaches to motion prediction by adding an auxiliary loss that penalizes off-road predictions. This auxiliary loss can easily be \emph{pretrained} using only map information (e.g., off-road area), which significantly improves performance on small datasets. We also investigate weighted cross-entropy losses to capture spatial-temporal relationships among trajectories. Our final contribution is a detailed comparison of classification and ordinal regression on two public self-driving datasets.
CoverNet: Multimodal Behavior Prediction using Trajectory Sets
Nov 23, 2019



We present CoverNet, a new method for multimodal, probabilistic trajectory prediction in urban driving scenarios. Previous work has employed a variety of methods, including multimodal regression, occupancy maps, and 1-step stochastic policies. We instead frame the trajectory prediction problem as classification over a diverse set of trajectories. The size of this set remains manageable, due to the fact that there are a limited number of distinct actions that can be taken over a reasonable prediction horizon. We structure the trajectory set to a) ensure a desired level of coverage of the state space, and b) eliminate physically impossible trajectories. By dynamically generating trajectory sets based on the agent's current state, we can further improve the efficiency of our method. We demonstrate our approach on public, real-world self-driving datasets, and show that it outperforms state-of-the-art methods.